the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 11 Apr 2025
| 11 Apr 2025
A new aggregation and riming discrimination algorithm based on polarimetric weather radars
Mathias Gergely
Silke Trömel
The distinction between riming and aggregation is of high relevance for model microphysics, data assimilation, and warnings of potential aircraft hazards due to the link between riming and updrafts as well as the presence of supercooled liquid water in the atmosphere. Even though the polarimetric fingerprints for aggregation and riming are qualitatively similar, we hypothesize that it is feasible to implement an area-wide discrimination algorithm based on national polarimetric weather radar networks only. Quasi-vertical profiles (QVPs) of reflectivity (ZH), differential reflectivity (ZDR), and estimated depolarization ratio (DR) are utilized to learn about the information content of each individual polarimetric variable and their combinations for riming detection. High-resolution Doppler spectra from the vertical (birdbath) scans of the C-band radar network of the German Meteorological Service serve as input and ground truth for algorithm development. Mean isolated spectra profiles (MISPs) of the Doppler velocity are used to infer regions with frozen hydrometeors falling faster than 1.5 m s−1 and accordingly associated with significant riming. Several machine learning methods have been tested to detect riming from the corresponding QVPs of polarimetric variables. The best-performing algorithm is a fine-tuned gradient-boosting model based on decision trees. The precipitation event on 14 July 2021, which led to catastrophic flooding in the Ahr valley in western Germany, was selected to validate the performance. Considering balanced accuracy, the algorithm is able to correctly predict 74 % of the observed riming features; thus, the feasibility of reliable riming detection with national radar networks has been successfully demonstrated.
- Article
(6996 KB) - Full-text XML
- BibTeX
- EndNote




The reliable detection and prediction (classification) of riming based on ground-based remote sensing observations is a crucial but not trivial endeavor. Despite the wealth of information offered by polarimetric radar measurements and their numerous associated advances in research, the distinction between dominant aggregation and riming processes using weather radar has been questioned to date. In this study, machine learning is exploited to reveal the relationship between different polarimetric variables as well as their combinations and the dominating riming processes in radar-monitored precipitation cells.
Ice crystals are subjected to a variety of microphysical processes during their lifetime as they fall to the ground (e.g., Kumjian et al., 2022). The most fundamental growth processes in the ice phase are aggregation, riming, and vapor deposition. However, these processes also occur in combination with fast transitions within the evolution of ice-phase particles (DeLaFrance et al., 2024). During aggregation processes, two or more ice crystals stick together through ice–ice collisions (Field et al., 2017) to form a single larger particle, transforming dense individual ice crystals into aggregated particles with reduced density but similar water content. In contrast to aggregation, riming describes the process when an ice particle collects supercooled liquid cloud droplets (ranging in size from micrometers to tens of micrometers); thus, ice water content increases at the expense of liquid drops. These rimed particles typically exhibit enhanced fall velocities (Kumjian et al., 2016) due to their rapid increase in mass and density. They can reach large sizes and become more isotropic (e.g., Maahn et al., 2024). While the increase in size and thus reflectivity (ZH), as well as the decrease in differential reflectivity (ZDR), is evident in both aggregation and riming, densely rimed particles fall with up to twice the speed of an equivalent unrimed particle with exactly the same maximum dimension (Locatelli and Hobbs, 1974).
The distinction between aggregation and riming below the dendritic growth layer (DGL; Ryzhkov and Zrnić, 2019), usually located between −10 and −15 °C, is important as the latter signals the presence of supercooled liquid water (SLW), and its accretion to the airframe (Serke et al., 2011) and critical flight data sensors (Milani et al., 2024) may produce an in-flight icing hazard for aircraft (Ellis et al., 2012). These dangerous conditions can be observed before or during the presence of riming signatures as long as SLW is not fully depleted. Overall, riming represents a key process as a large percentage of cloud systems contain SLW (Hogan et al., 2003), especially below the DGL. SLW may also trigger additional ice growth via the Wegener–Bergeron–Findeisen process (Wegener, 1912; Bergeron, 1935; Findeisen, 1938). Furthermore, riming favors secondary ice production through the Hallett–Mossop ice multiplication process, also known as rime splintering (Hallett and Mossop, 1974), which is active between −3 and −8 °C. Thus, future benefits and applications of the envisioned area-wide riming detection algorithm based on slant-viewing polarimetric weather surveillance radars only are manifold. It supports and improves process understanding and enables detailed model evaluation. Also, state-of-the-art polarimetric microphysical retrievals (e.g., ice water content, number concentrations, and mean volume diameters) show convincing accuracy and encourage their use for model evaluation and data assimilation (Blanke et al., 2023). However, these retrievals are not designed for riming conditions when graupel or even hail can be present. With a riming detection on hand, the assimilation of such modified retrievals into numerical weather prediction models could be restricted to regions where enhanced accuracy can be expected to further improve, for example, quantitative precipitation forecasts.
Since cloud droplets mostly present with less than 50 µm in diameter, the direct detection of SLW with weather radars is not possible. Instead, past studies repeatedly employed the mean Doppler velocity from profiling radars to detect and study riming. For example, Mosimann (1995) derived a quantitative relationship between radar Doppler velocities of a vertically pointing X-band radar and riming in stratiform precipitation. Fall velocities of unrimed snow particles do not exceed 1 m s−1 (Locatelli and Hobbs, 1974; Karrer et al., 2020), because during the aggregation process the impact of increasing mass on the terminal velocity is to a great extent balanced out by the additional air drag (Zawadzki et al., 2001). However, substantially rimed particles can exhibit fall velocities ranging from 1.5 to 2.5 m s−1 or even faster (e.g., Vogel et al., 2015; Matrosov, 2023).
To set up the area-wide riming detection algorithm based on slant-viewing polarimetric weather surveillance radars only, we utilized and analyzed quasi-vertical profiles (QVPs; Trömel et al., 2013; Ryzhkov et al., 2016) of ZH, ZDR, and in particular depolarization ratio (DR). Ryzhkov et al. (2017) introduced DR as a good proxy for radar circular depolarization ratios and a potential candidate for the detection of riming. Due to the inherent noise reduction and the presentation of polarimetric variables in a time versus height format, QVPs facilitate the detection of fingerprints for dominating microphysical processes and their temporal evolution in a sufficiently homogeneous cone spanning above the radar. The polarimetric fingerprints for (heavy) riming and aggregation are qualitatively the same, exhibiting an increase in ZH and decreases in ZDR as well as specific differential phase KDP, unless a substantial concentration of columnar ice crystals is simultaneously prevalent, which may lead to an observable increase instead of decrease in KDP (e.g., Kumjian, 2012; Kumjian et al., 2022). However, the time–height format of QVPs enables the investigation and quantification of the relationships between different polarimetric variables and Doppler velocities. In this study, profiles of Doppler spectra, which can be interpreted as a distribution of particle fall velocities superimposed with vertical air movements as a function of height (Fabry, 2015), are used to introduce and train a radar algorithm for the discrimination between the two processes. Similar to ZDR, DR is lower in rimed snow than in aggregated snow, but the corresponding difference in DR is generally larger. While ZDR differs by 0.2–0.4 dB, DR differs by 2–4 dB between these two processes (e.g., Ryzhkov et al., 2017). Such differences are clearly evident in QVPs.
A variety of techniques and machine learning methods for classification are available in the literature. In this study, we focused on four approaches, namely, logistic regression (LR; Wilks, 2011), a quadratic discriminant analysis (QDA; Geisser, 1964), gradient-boosting machine (GBM; Friedman, 2001), and multilayer perceptron (MLP), artificial neural network, to set up the algorithm. One great advantage of these methods lies in their ability to sift through large amounts of training data and discover meaningful patterns that are not easily discernible to humans.
The article is structured as follows. In Sect. 2 an overview of the remote sensing observational database and processing techniques is provided. Section 3 introduces the different methods tested as well as the performance metrics considered throughout this work, while Sect. 4 details DR and the algorithm development. The main results and verification are presented in Sect. 5. The final algorithm is subsequently applied to an independent riming case, followed by an elaboration on the main advantages along with the limitations of the newly proposed algorithm. Section 6 closes with a summary and a comprehensive discussion of directions for future research and refinement opportunities.
The quality of the training data is key for the performance of algorithms developed with machine learning techniques. Schultz et al. (2021) pointed out that the proper selection and preparation of data is of crucial importance in order to achieve good and generalizable results. Accordingly, this section presents the preparation and processing of the radar data used.
2.1 Polarimetric C-band radar data
Our analysis is based on observations of DWD's national C-band (wavelength ≈5.6 cm) weather radar network including 17 state-of-the-art polarimetric Doppler radars continuously performing 3-D volume scans in a 5 min scan schedule. These include plan position indicator (PPI) scans measured at 10 radar elevation angles between 0.5 and 25°, each with a resolution of 1° in azimuth and 0.25 km in range. Typical maximum slant ranges are about 180 km. At higher elevation angles of more than 8°, the maximum slant range decreases to around 60 km. A vertically pointing scan, so-called birdbath scan, ends the 5 min sampling sequence. More detailed information of the scanning routine, radar systems, and data processing at DWD can be found in Helmert et al. (2014) and Frech et al. (2017).
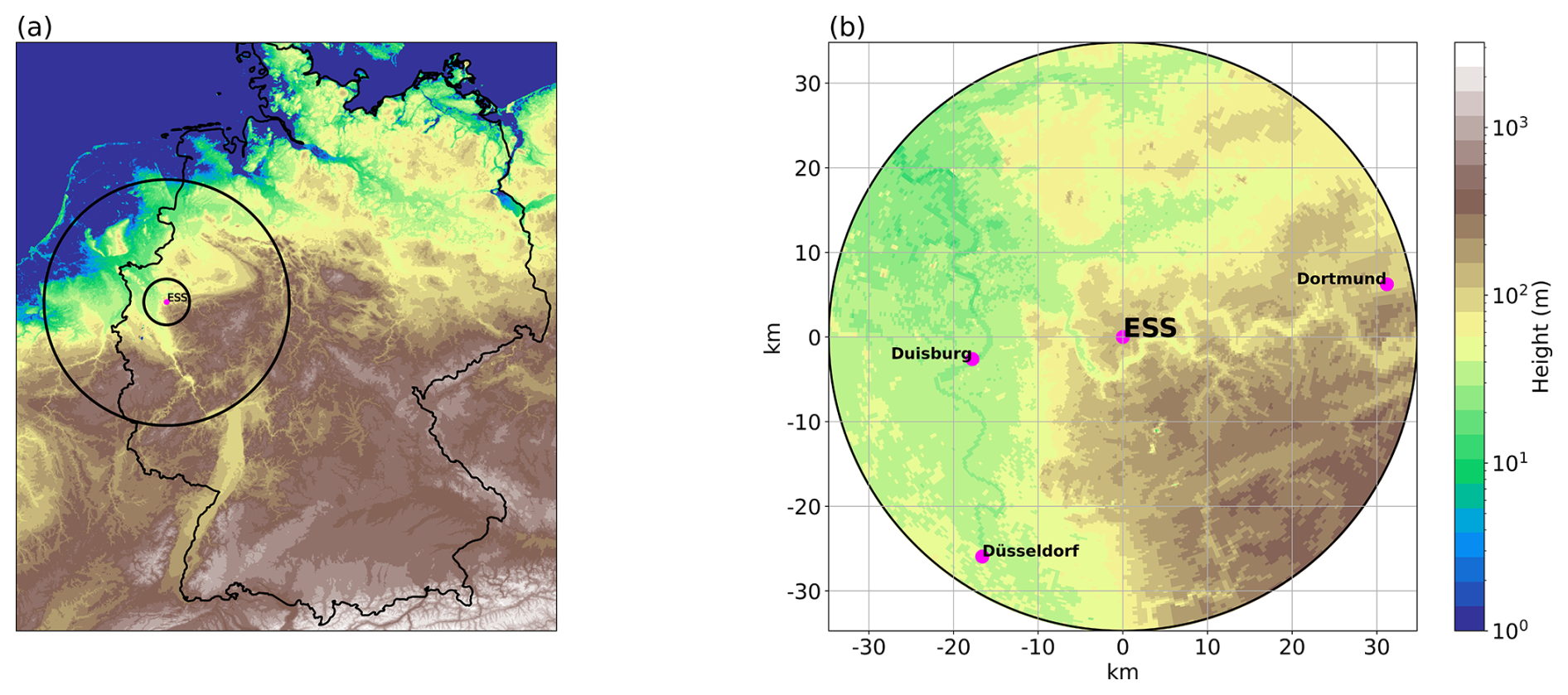
Figure 1Panel (a) shows the geographic location (magenta dot) and area covered by the operational Essen radar (ESS; lat: 51.405649° N, long: 6.967111° E; alt: 185.11 m a.s.l.) in western Germany with the PPI at 1° elevation angle. The larger circle indicates the approximate maximum range of 180 km around the radar, and the smaller circle indicates the coverage limited to a range of 35 km. Panel (b) displays a zoom-in view of the limited ESS region. Colors indicate the terrain height of the study area (in m a.s.l). A selection of surrounding cities are also indicated with magenta dots.
This study explores riming cases observed at DWD's Essen radar site (ESS; Fig. 1), located in western Germany in order to train the riming algorithm. These data include five stratiform precipitation events monitored on 13 May 2021, 24 July 2021, 3 November 2021, and two time segments on 2 January 2022. Furthermore, one additional event on 14 July 2021 is used for final evaluation (Table 1).
Table 1List of events including the time periods from consecutive birdbath scans recorded at the ESS radar and their utilization purpose. While the event on 14 July 2021 (Ahr valley flooding) is used as an independent data set for the evaluation of the riming algorithm, the remaining events are used for algorithm development and referred to as the initial data set in Sect. 4 and Fig. 5.
QVPs of polarimetric variables are generated based on PPI scans measured at 12° elevation, enabling the joint analysis with the birdbath data. We constrained the calculation of the QVPs to a maximum range of 35 km (Fig. 1) in order to, on the one hand, improve the comparability and, on the other hand, still cover sufficiently high altitudes. Preceding quality control, calibration and preprocessing of the radar data are performed as follows.
To mitigate the impact of noise and non-meteorological scatterers, data are filtered with a cross-correlation coefficient ρhv≥0.8. Noise corrections following Ryzhkov and Zrnić (2019) are applied to ρhv, and the theoretical ZH–ZDR relationship for C-band in light rain (Ryzhkov and Zrnić, 2019) is used to calibrate ZDR. Due to the identified elevation dependency of the offset, this calibration method was preferred to the use of the birdbath scan. Furthermore, only radar data with a signal-to-noise ratio (SNR) greater than 10 dB are taken into account after the correction of ρhv. For the development of the riming algorithm, it is particularly important to exclude events with pronounced updrafts and downdrafts associated with convection. Thus, only stratiform precipitation with a detectable melting layer (ML) is considered. So, after QVP calculation, the ML detection strategy introduced by Wolfensberger et al. (2016) is used to derive a first-guess estimate of the ML locations and then adjusted to nearby locations where ρhv returns to values above 0.97 (Giangrande et al., 2008). The precise detection not only allows for the selection of stratiform rain, but also enables us to restrict the analysis to the pure ice phase above the ML.
2.2 Doppler spectra
Doppler spectra can provide high-resolution profiles of the radar's equivalent reflectivity factor, mean Doppler velocity (MDV), and spectrum width and are widely used to determine microphysical and dynamical properties of clouds (e.g., Kollias et al., 2007; Kalesse et al., 2016; von Terzi et al., 2022; Billault-Roux et al., 2023). Only since the update of the scan schedule for the national radar network of the DWD on 18 May 2021 are Doppler spectra stored for the entire C-band radar network on a regular basis. Previously, the operational birdbath scan was mainly used for the calibration of ZDR (Frech and Hubbert, 2020), but the Doppler spectra now provide new opportunities for operational applications. This study employs them as ground truth for riming occurrences.
The flexible multistep post-processing of the Doppler spectra as described in Gergely et al. (2022) is performed to isolate the weather signal from non-meteorological echoes exploiting polarimetric attributes (e.g., the signal power in one of the two available polarization channels, the absolute value of the uncalibrated spectral differential reflectivity sZDR, and the texture of sZDR) and to calculate the properties of each precipitation mode identified, as well as potential multimodal characteristics, if more than one mode is present. These characteristics, such as bimodal amplitude and separation (as defined in Zhang et al., 2003), are used to quantify the relation among the individual simultaneously occurring precipitation modes. Figure 2 demonstrates the performance of the method. The complete spectra (left panel) include unwanted non-meteorological contributions and static clutter at Doppler velocities close to 0 m s−1 at all heights. These artifacts are removed in the processed spectra (right panel) together with the antenna near-field signal, which extends up to a height of about 650 m at all Doppler velocities and determines the minimum valid height. The weather signal reaches up to an altitude of about 8 km with a transition from frozen precipitation to much faster-falling rain at heights about 2 km above the radar. Rain below the ML shows a broader distribution and also higher fall velocities of up to −6 m s−1. Moreover, this isolated spectrum shows evidence of significantly rimed snow above the ML. It contains two precipitation modes between approximately 2 and 3 km height. The primary mode is characterized by fall velocities larger than −2 m s−1, typical for rimed particles, while the second mode exhibits reduced velocities around −1 m s−1.
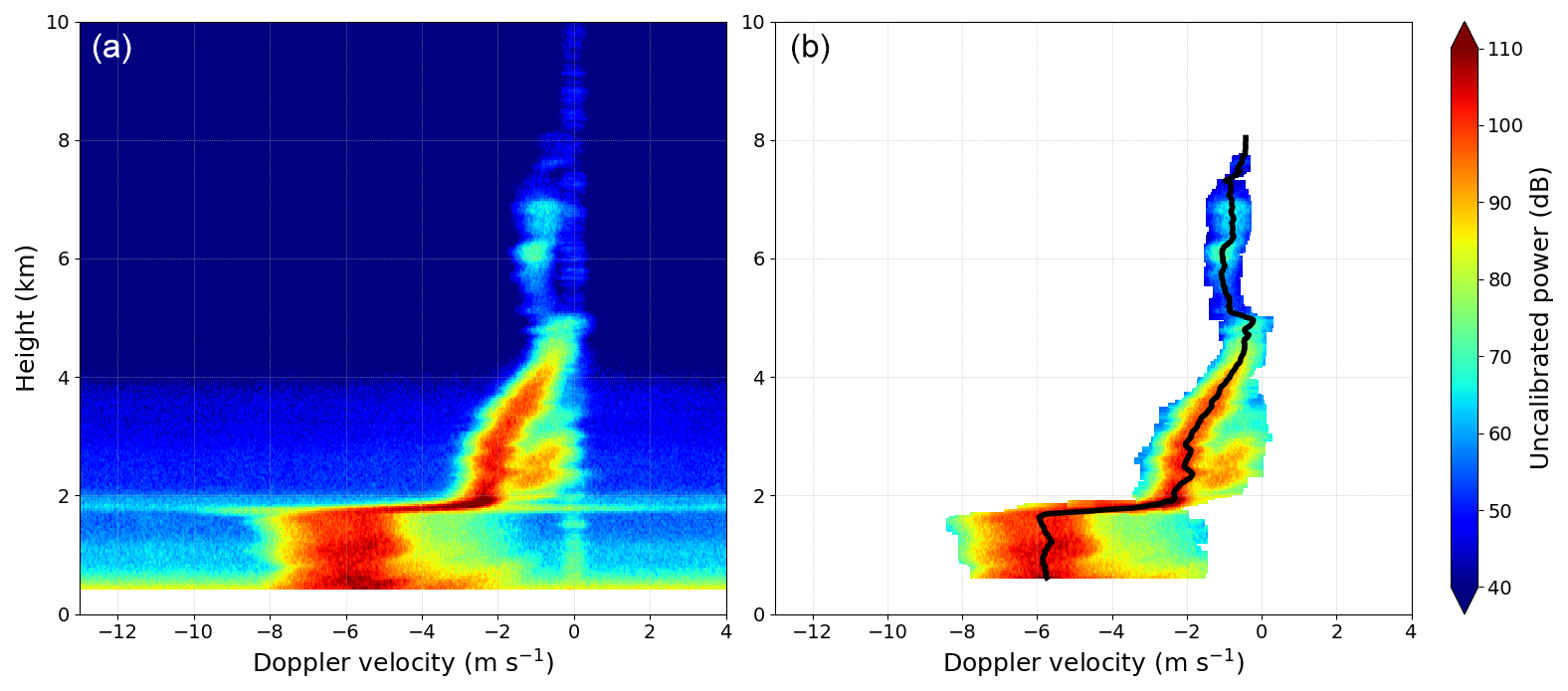
Figure 2Mean Doppler power spectra of an exemplary 15 s birdbath scan recorded on 2 January 2022 at 03:40 UTC. The direct output (a), after the internal radar signal processor had already applied a notch filter to mitigate strong clutter near 0 m s−1 for each individual Doppler spectrum, is shown together with the isolated average Doppler spectra after postprocessing (b). Colors indicate the uncalibrated radar signal power (in dB). The black line indicates the corresponding mean profile of power-weighted mean velocity.
So far, Doppler spectra recorded with DWD's C-band radars have only been used to study the profiles of individual birdbath scans in detail (Trömel et al., 2021; Gergely et al., 2022). By applying in the ensuing step the novel mean isolated spectra profile (MISP) technique, time series of the processed spectral data can be displayed in a convenient time vs. height format, allowing for a direct comparison with polarimetric QVPs. The MISP technique uses the mean of the isolated spectra (e.g., right panel in Fig. 2) at each height level with all included precipitation modes. Note that the derived MDV from the isolated spectra contains a weighting and is therefore calculated from the power-weighted mean velocity (in m s−1) for all precipitation modes, with the Doppler power in each individual spectral bin denoted by S, thus explicitly accounting for the spectral dependence on Doppler velocity v:
The resulting mean profiles in the time versus height format are then referred to as MISP. The MISPs of MDV allow for the distinction between various hydrometeor types. Note that only stratiform precipitation events should be considered to minimize misinterpretation due to vertical air motions. Temporal averaging over each 15 s birdbath scan already dampens the effects due to large-scale vertical air motion and reduces the influence of turbulence on the measured Doppler velocities of the falling precipitation particles.
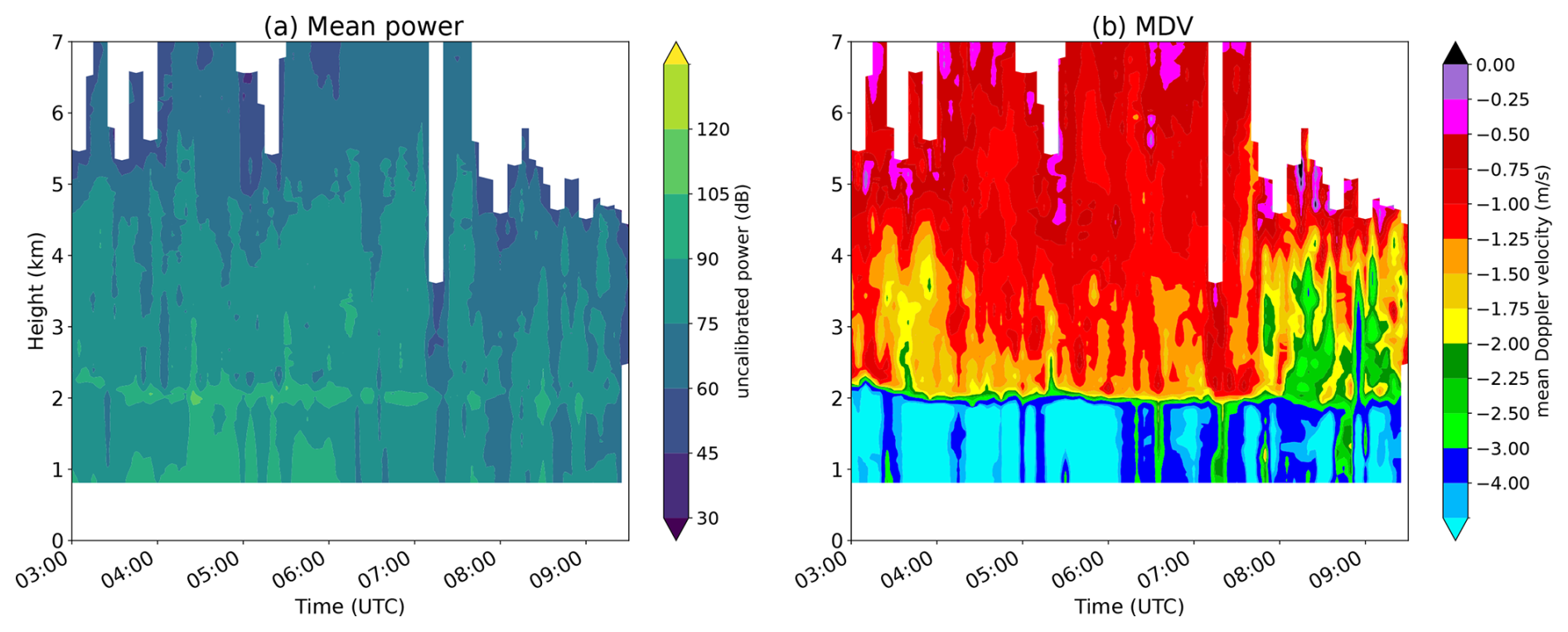
Figure 3MISPs of mean power (a) and MDV (b) observed by the ESS radar, recorded on 2 January 2022 between 03:00 and 09:30 UTC. Negative MDV values indicate motion towards the radar.
As an example, Fig. 3 shows MISPs of mean power (in dB) and MDV for a riming event on 2 January 2022. The rapid increase in Doppler velocities at an altitude of around 2 km indicates the transition from the ice to the liquid phase and is in agreement with the detected ML height in the QVPs (not shown). Above the ML, the event shows MDVs exceeding 1.5 m s−1, clearly indicating riming processes (Kneifel and Moisseev, 2020). However, the potential occurrence of densely rimed dendrites, as well as lightly rimed aggregates, e.g., during the fill-in stage of riming growth (Heymsfield, 1982), is challenging to detect with such a fixed threshold value of 1.5 m s−1. The fall velocity of such rimed particles may overlap with the ones of unrimed aggregates. Furthermore, larger particles/aggregates, mostly associated with higher ZH values, fall faster than smaller particles with the same riming degree (or fraction of riming) but lower reflectivities (e.g., Ryzhkov and Zrnić, 2019).
Decreasing air density with height impacts the fall velocity of hydrometeors and needs to be taken into account to avoid misinterpretation. Therefore, raw MDVr data are transformed into fall velocities at surface conditions. Following Heymsfield et al. (2013), the pressure (p)-transformed MDV at altitude z is given by
where pref is the reference pressure at the surface. In this study, profiles (p(z)) were obtained from radio soundings of the worldwide repository hosted at the University of Wyoming (http://weather.uwyo.edu/upperair/sounding.html, last access: 27 March 2024) for the permanent sounding station Essen (station number 10410), which is the only directly colocated sounding station available for the DWD network. In the following, the transformed MDVr is referred to as MDV and interpreted as the typical particle fall velocity. Finally, the rime mass fraction (RMF), defined as the fraction of total particle mass obtained by riming (Kneifel and Moisseev, 2020), can be derived from the MISPs of MDV.
First Sect. 3.1 presents a general description of the learning techniques utilized, followed by an overview of all statistical metrics used for evaluation in Sect. 3.2.
3.1 Description of the learning techniques
Several approaches to classify rainy observation periods as dominated by riming processes or not based on polarimetric radar variables only were tested. Besides a simple threshold-based approach (TB), the relationship between Doppler velocities and different polarimetric variables can also be learned (e.g., by a supervised neural network). Therefore, we investigated four methodologies: an LR, a QDA, a GBM based on decision trees, and an MLP ANN (artificial neural network) trained with a commonly used back-propagation algorithm (Table 2). In the following, the basic principles of the selected methods are briefly described together with the respective hyperparameters that define the architecture and training process if needed. Tools from the scikit-learn Python machine learning library (Pedregosa et al., 2011) were utilized for all the learning methods. For more detailed information on these methods and their mathematical formulations, we refer the reader to the scikit-learn user guide.
Wilks (2011)Geisser (1964)Friedman (2001)Schmidhuber (2015)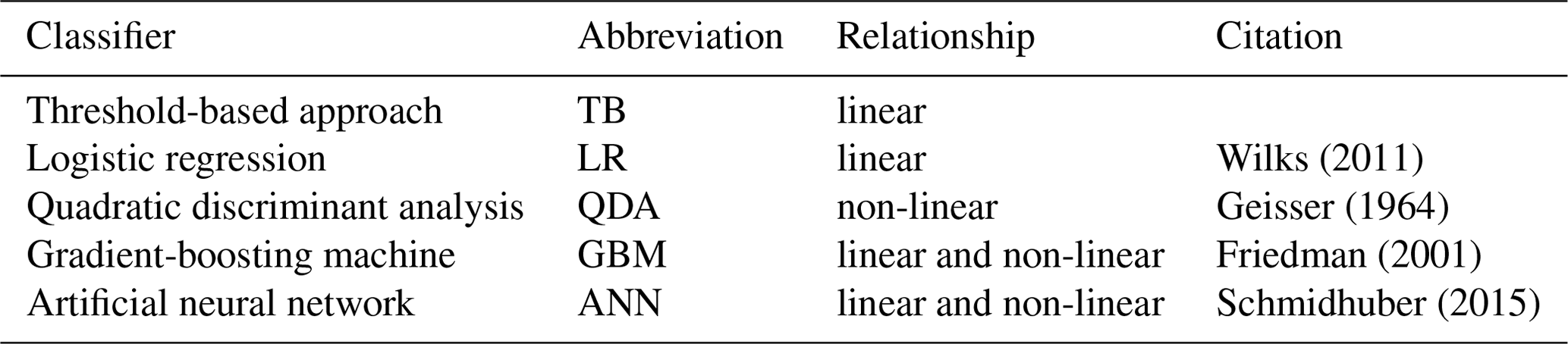
The most basic detection method for riming, that defines the TB herein, relies on threshold criteria of the polarimetric variables estimated via scatterplots of the variables relative to MDVs faster than 1.5 m s−1. Expectations with respect to riming based on prior studies (e.g., Ryzhkov et al., 2016) are also taken into account for the selection of these thresholds.
As a first statistical analysis method, LR is used to model the dependence of a binary response variable on one or more explanatory variables. The probability of an event success is modeled by taking the log-likelihood for the event to be a linear combination of one or more independent variables. LR is easy to implement and interpret and efficient to train.
The QDA algorithm is a classic and flexible classifier with a quadratic decision surface that minimizes the total probability of misclassification, and it allows for a non-linear separation of data. Therefore, it fits a Gaussian density (covariance matrix) to each class. No assumption on identical covariances for each class is required. After modeling the likelihood of the classes with a supervised method, the QDA uses a normal distribution to make predictions. A QDA algorithm is easy to compute (no hyperparameters to tune) and inherently multiclass.
The GBM is a learning technique based on decision trees (Breiman, 1996). It is a generalization of tree-boosting in which the learning task is posed as a numerical optimization problem. Boosted trees are comparable to random forests (Breiman, 2001) in the sense that an ensemble of decision (regression) trees are considered and calculated. As opposed to bagging during the ensemble and resampling processes, a boosting procedure is considered a technique in which simple parameterized models are sequentially added to the ensemble at each iteration.
At the beginning, the number of maximum splits within each tree (also known as the depth) is specified as a hyperparameter in the process of model tuning. In order to reduce variance and bias, each tree is computed as a function of its predecessors and weighted according to its accuracy. The gradient descent procedure is used to iteratively update the weights, and it minimizes the difference from the function predicting the actual observation. Using numerous model outputs in combination is advantageous to further reduce biases.
In general, an ANN represents a mathematical model trained to recognize patterns and to make predictions. A MLP is a fully connected neural network that consists of an input layer, several hidden layers (artificial neurons), and an output layer. It typically performs a sequence of matrix multiplications, followed by an element-wise non-linear function (the activation function) for each iteration. These allow the network to learn linear and non-linear relationships. Similar to the GBM, hyperparameters such as the number of hidden layers (referred to as the layer depth), the corresponding number of neurons, the type of activation function, and the initial learning rate needs to be tuned to derive the optimal architecture for the ANN. In this study, a fairly simple ANN structure can be employed, which generally reduces the risk of overfitting and requires less computation.
3.2 Scores and performance metrics
The performances of the proposed riming retrievals are evaluated by computing multiple pertinent scores to ensure robustness of the evaluation procedure. Here, we convert the ground truth and the results of the retrievals into binary fields (riming yes/no; in other words, presence of riming or lack thereof) in order to simplify the analysis and efficiently apply and adapt it to our needs.
Four distinct types of metrics, including true negative (TN), false positive (FP), false negative (FN), and true positive (TP), are broadly used to assess the performance of binary classification analyses. Based on those, the accuracy (ACC), precision (PR), true negative rate (TNR; referred to as specificity), and recall (RC; also known as sensitivity in diagnostic binary classification) are defined as follows:
and
The distinct metrics can be displayed in a 2×2 contingency table (Pearson, 1904), which is also referred to as the so-called confusion matrix (Miller and Nicely, 1955),
summarizing the results of the classification. The standard ACC ranges in the real unit interval [0, 1]. The highest possible value of 1 corresponds to perfect classification, whereas 0 is the lowest possible value indicating clear misclassification.
Overall, ACC tends to provide a too optimistic assessment of the classification ability if the category to be detected is underrepresented; that is, ACC is not adequate to quantify the performance of an unbalanced data set. In general, an evaluation metric alone is only able to reflect part of the model's performance (Wang et al., 2024). One alternative is the commonly used balanced ACC (BA), which is the arithmetic mean of sensitivity RC and specificity TNR:
Again, BA ranges between 0 and 1 and is an appropriate metric dealing with unbalanced data sets.
Further, the F1 score represents a harmonic mean of PR and RC and is calculated as
reaching the value of 0 in the case of clear misclassification and the best value of 1 for perfect classification. This metric is more sensitive to changes in the detection of positives, because, unlike ACC, the F1 score does not take into account TN (not symmetric). Excluding TN can be especially beneficial because it can dominate classification tasks in meteorology due to the often rare nature of events (Chase et al., 2022), e.g., the occurrence of riming.
The Matthews correlation coefficient (MCC; Matthews, 1975) is another measure for the quality of binary classifications, which is not affected by imbalanced data sets:
MCC, also known as the ϕ coefficient, is a correlation coefficient value ranging between −1 and +1. A coefficient of +1 represents a perfect prediction, 0 an average random prediction, and −1 an inverse prediction. However, MCC represents a binary classifier that yields a high score only if the binary predictor was able to correctly predict the majority of positive and the majority of negative outcomes. Also, the normalized MCC, hereafter defined as , can be useful since it linearly projects MCC onto the range interval from 0 to 1.
The Jaccard index (Jaccard, 1901), also termed “intersection over union” (Wilks et al., 1990) and frequently referred to as the critical success index (CSI; Donaldson et al., 1975) in meteorological literature, is a statistic used for comparing the similarity and diversity of finite sample sets and defined as the ratio between the size of the intersection and the size of the union of the sample sets A and B:
with values ranging between 0 (no overlap) and 1 (complete overlap). Like the F1 score, J does not consider TN.
Lastly, the widely used Cohen's kappa (κ) expresses the level of agreement between two sets and takes into account the agreement occurring by chance. In meteorology, it is also known as the Heidke skill score (Heidke, 1926) and is calculated via
with values ranging from −1 to 1. Despite known disadvantages, e.g., the high sensitivity to the distributions of the marginal totals, it is included as one of the most popular metrics used in machine learning for comparison.
In order to quantify the role of each individual polarimetric variable as predictor in the riming algorithm, Shapley values (Shapley, 1953) are used as in Buschow et al. (2024). The Shapley values, originally developed in game theory, provide information on how the payout (prediction) can be fairly distributed among the predictors (also denoted as features). Note that these calculated contributions always add up to the total amount; however, the importance of a variable may vary for each performance measure considered. Essentially, the calculated Shapley values allow for a ranking of input features according to their relevance. The inherent impurity-based feature importance (also known as Gini importance or mean decrease impurity; Breiman, 2001) is additionally used, as it indicates the importance within the same model, which does not require recalculation or tuning of hyperparameters. For random forests, it is defined as the total decrease in node impurity averaged over all trees of the ensemble and measures the amount each feature contributes to the reduction in variance of the model when that feature is used to split the data. In contrast to Shapley values, this performance measure is considered biased towards features with high cardinality (Grömping, 2009), i.e., a large number of distinct values.
Section 4.1 emphasizes DR as a promising proxy for ongoing riming processes and details the microphysical information content of the to-date still underutilized polarimetric variable DR in general, while Sect. 4.2 describes the entire workflow of the riming detection algorithm development.
4.1 Depolarization ratio
The impact of riming on ZDR is twofold. On the one hand, the ice particles become more spherical due to riming, which leads to a reduction in ZDR beyond the initial fill-in stage of riming growth (Sect. 2.2). On the other hand, the associated increase in density is supposed to increase ZDR. Observations indicate that the impact of the particle shape dominates the impact of density, resulting in a small overall reduction of ZDR in the case of heavy riming (Ryzhkov et al., 2016). DR, however, proved to be a useful parameter for characterizing the microphysical properties of snow and shows a more pronounced riming fingerprint (e.g., Ryzhkov et al., 2017).
DR can be derived from measurements of dual-polarization radars operating in SHV mode (simultaneous transmission/reception of orthogonally polarized waves) and represents a good proxy for the circular depolarization ratio (CDR) measured by radars with circular polarization (Matrosov, 2004; Ryzhkov et al., 2017). Thus, DR can be derived based on measurements of the DWD network and included as predictor in the envisioned riming algorithm. In the Rayleigh scattering regime, the following proportionality applies to CDR (in dB) for oriented spheroidal particles assuming dry aggregated snow with low bulk density of snow ρs inversely proportional to the equivolume diameter D (Ryzhkov and Zrnić, 2019):
where ρs is expressed in g cm−3; La and Lb are the particle shape parameters; α0 is a constant that is approximately equal to 0.15; and frim denotes the degree of riming, which ranges from 1 for unrimed ice to 5 for heavily rimed ice, and can be expressed as a function of RMF as ). CDR is mostly a function of shape, as the net effect of Eq. (14) is dominated by the more spherical shape of rimed snow compared to unrimed snow and not by the effect of increasing density, which ultimately results in a stronger reduction of CDR for rimed snow.
As a proxy of CDR, DR (in dB) can be estimated via
where Zdr denotes the differential reflectivity in linear units. Equation (15) combines the information content of Zdr and ρhv in a single, more meaningful quantity. And due to the inherent noise reduction in the QVP methodology, an even clearer riming fingerprint can be expected. DR bears several advantages over CDR measurements and, thus, is more robust. In contrast to CDR, DR does not depend on propagation phase shift, is available in all radar resolution volumes where directly measured co-polarized signals are reliably measured, and has a rather modest sensitivity to particle wobbling (Matrosov, 2020). In addition, unlike other polarimetric variables such as ZDR, DR shows only weak dependence on the orientation of the hydrometeors and is less affected by noise (Ryzhkov et al., 2017). While low DR values are expected for almost spherical targets, high values indicate a wide variety of shapes or elongated targets. Aside from this shape dependence, the DR values also depend strongly on the particle density.
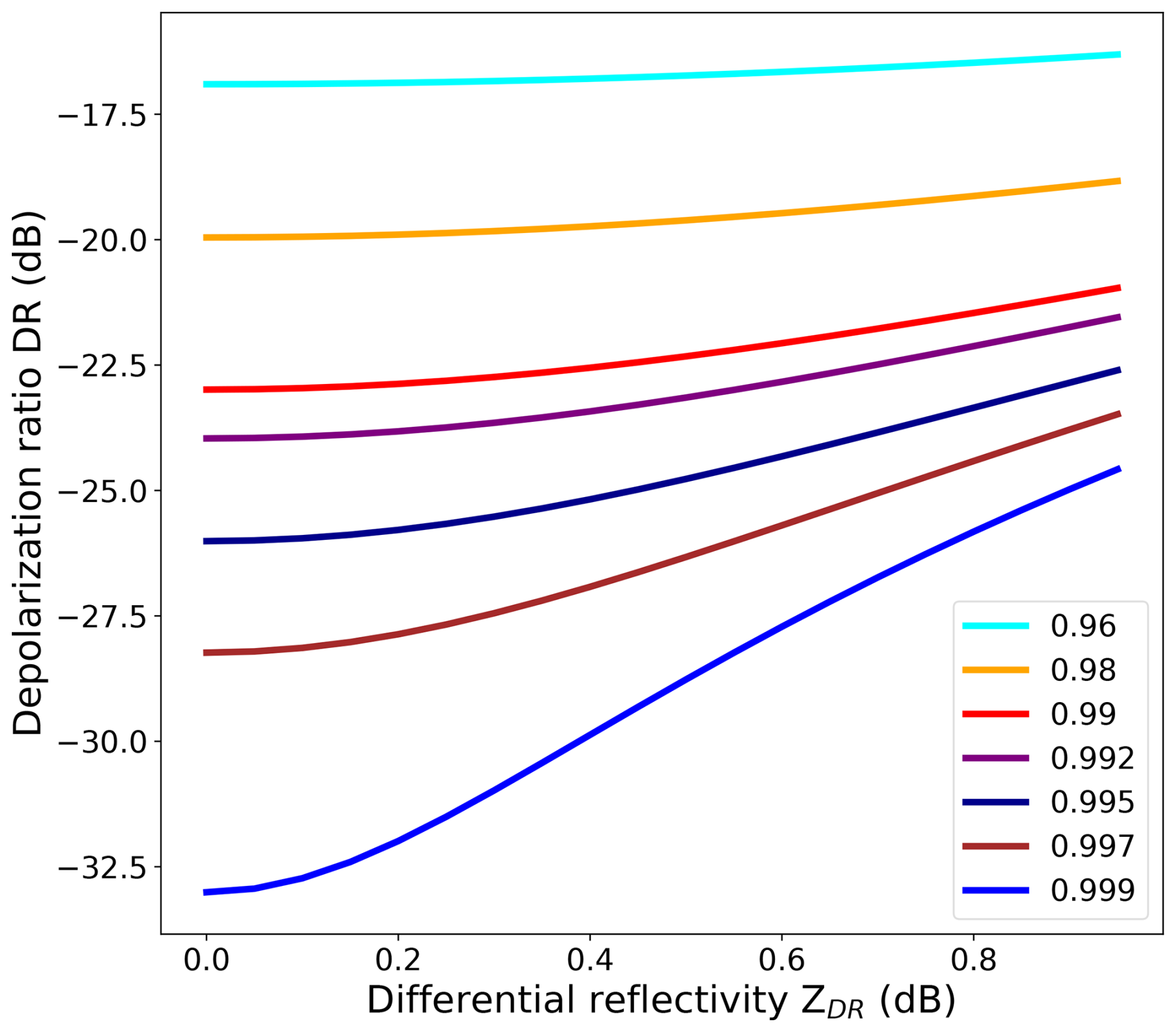
Figure 4DR–ρhv relations given by Eq. (15) for different values of ZDR. The colors represent different values of ρhv.
Figure 4 illustrates and quantifies the strong variability of DR with ρhv. In the case of heavy riming, an increase of ρhv is to be expected due to decreasing anisotropy, resulting in more negative DR values. Eventually, strong vertical DR columns in QVPs may help to better identify riming and its vertical extend aloft.
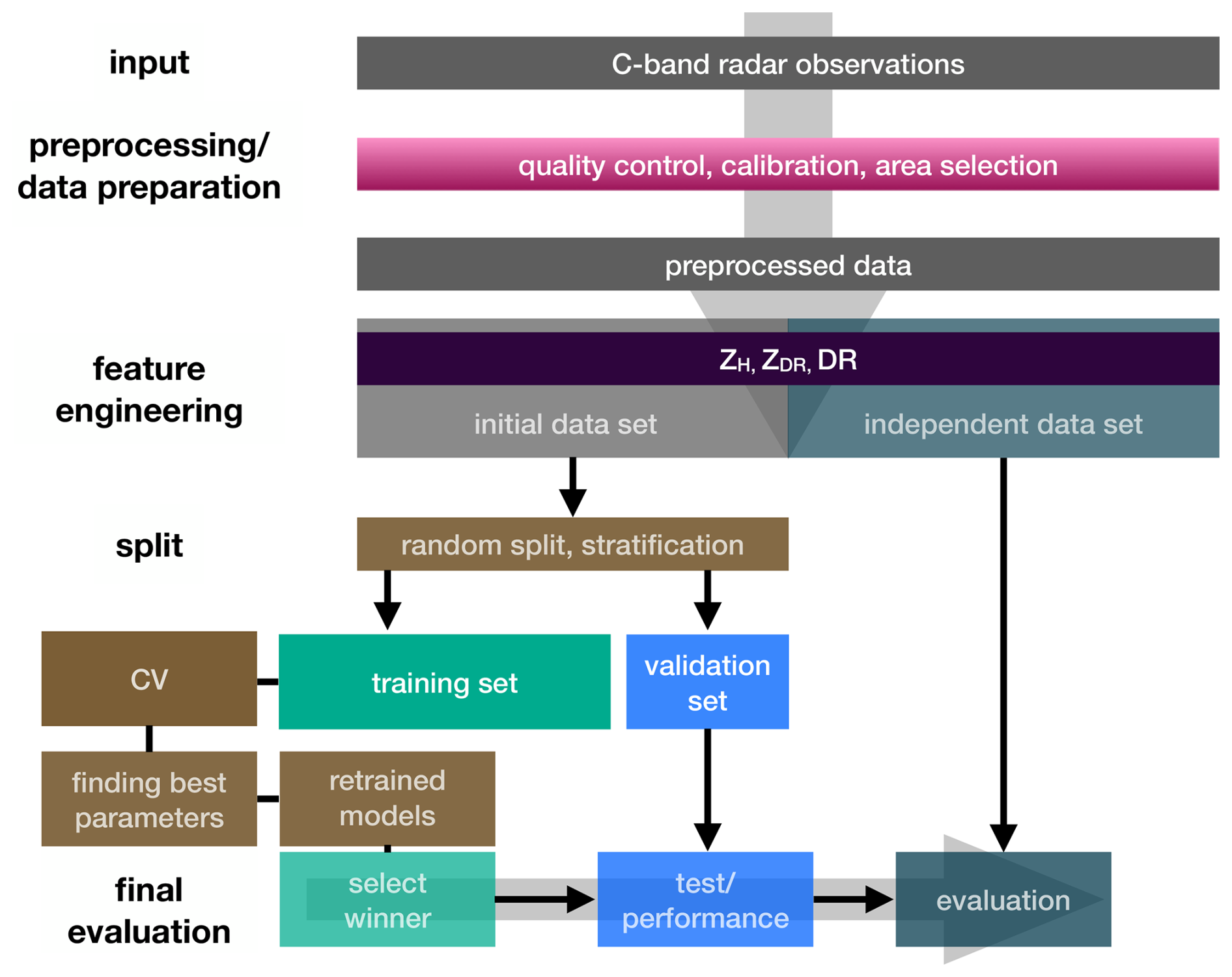
Figure 5Graphical representation of the classification workflow for the algorithm development. The two steps performed after cross-validation (CV), indicated as brown boxes, are only carried out for the GBM and the ANN but skipped for the other classifiers.
4.2 Workflow
This section describes the setup, training, and evaluation procedure of the tested algorithms, and Fig. 5 summarizes the complete schematic workflow of the algorithm development. First, a preselection of relevant potential predictors based on manual feature engineering is done, i.e., taking the information content of the polarimetric variables into account. Therefore, the same set of polarimetric variables, namely, ZH, ZDR, and DR, are fed as inputs to all approaches. ZH increases with increasing particle size, and ZDR decreases with decreasing oblateness; both are well-known effects of riming. DR was selected as it combines the information content of ZDR and ρhv and suspected to potentially amplify the riming fingerprint (see Sect. 4.1).
The overall database is split into two parts: one used for the algorithm development and referred to as the initial data set and the other used for the evaluation and referred to as the independent data set (see again Table 1 and Fig. 5). The employed data set for development is, however, just a subset of the initial data set and again split into a ratio of 70 % to 30 % for a training and validation set, respectively (compare with Fig. 5). Both the training set and the validation set show the same proportions of riming and non-riming sequences like the initial data set (stratification), which is unbalanced (21 % were labeled as riming and 79 % as no-riming). The prediction task is to classify whether a riming threshold is exceeded by training all classifiers to predict Doppler velocities faster than 1.5 m s−1 with a total of 16 491 colocated data points within the initial data set. To optimize the performance of the different approaches, a cross-validation (CV) is performed on the training set to minimize overfitting and to tune hyperparameters. Thus, this training data are again divided into k smaller sets (k folds) of sub-training and sub-validation sets, whereby a split into five (k=5, five iterations) equally sized sets is chosen here. K-fold cross-validation is a method of validation frequently utilized in machine learning to assess the generalization ability of a prediction model. Model tuning is also performed to investigate the impact of hyperparameter configurations, that depend on the selected classifier, on the performances. The best possible set of hyperparameters from a pre-selected parameter space are found via a grid search method. In summary, the training is performed on the effective training set, then the initial evaluation of all models is performed, and if the classification task appears to be successful, the evaluation of the winners of the (tuned) models can be performed on the remaining 30 % hold-out validation set. The last evaluation step is carried out on the independent data set for the best model found.
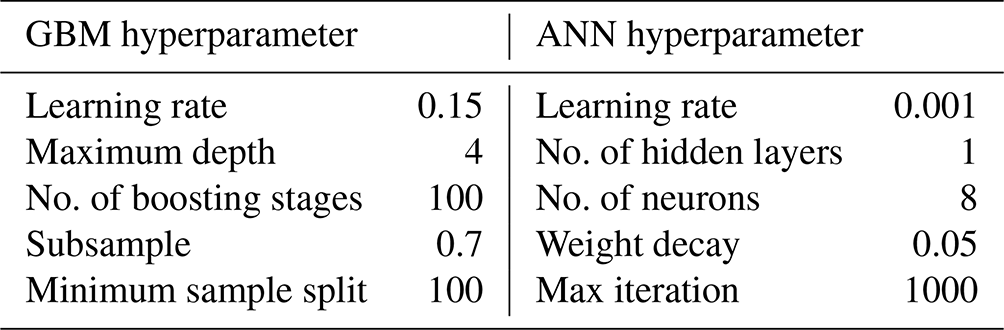
Table 3 shows the best-performing set of identified model hyperparameters (tuning results) describing the structure for both the GBM and the ANN as a reference for potential future applications. The latter uses a hidden layer with a hyperbolic tangent activation function.
Finally, we tested the TB using selected hard thresholds for all polarimetric variables included (DR dB; 0.05 dBZ < ZDR<0.21 dB; ZH>10 dBZ) on the validation data set.
First, the precipitation event observed on 2 January 2022 between 03:00 and 09:30 UTC is presented in more detail to illustrate the information content of the polarimetric variables before, in a second step, the methods described in Sect. 3.1 are applied to all events except the independent (Ahr valley flooding) case in Table 1 to set up the riming detection algorithm.
Figure 6 shows QVPs of ZH, ZDR, ρhv, and DR for the selected test case. Similar QVP products have been generated for all time periods used (not shown here). ML signatures in terms of ZH, ZDR, and ρhv are clearly visible during the entire period (Fig. 6). A band of enhanced ZDR values is visible within the DGL located between −10 and −15 °C (Fig. 6b). In addition, the QVP of DR (estimated from Eq. 15) in Fig. 6d indicates pronounced maxima within the ML approaching −10 dB. Downward excursions or sagging of the ML (see also Kumjian et al., 2016, and Xie et al., 2016) may indicate riming processes; however, also changes in precipitation intensity and associated cooling due to the enthalpy of melting may cause these signatures (Carlin and Ryzhkov, 2019). To illustrate the connection between a sagging ML and riming, the signature is detected by (1) applying a moving average to the ML top and bottom, respectively; (2) calculating the first derivative of both time series; and (3) identifying the negative slopes of ML top and bottom. Indeed, the QVP of DR shows episodic sagging of the ML mostly during time periods with noticeably reduced values of DR directly above the ML and up to altitudes of 4 km (Fig. 6d). These pronounced DR columns are mostly located at temperatures above −10 °C, where riming is more favored (Kneifel and Moisseev, 2020).
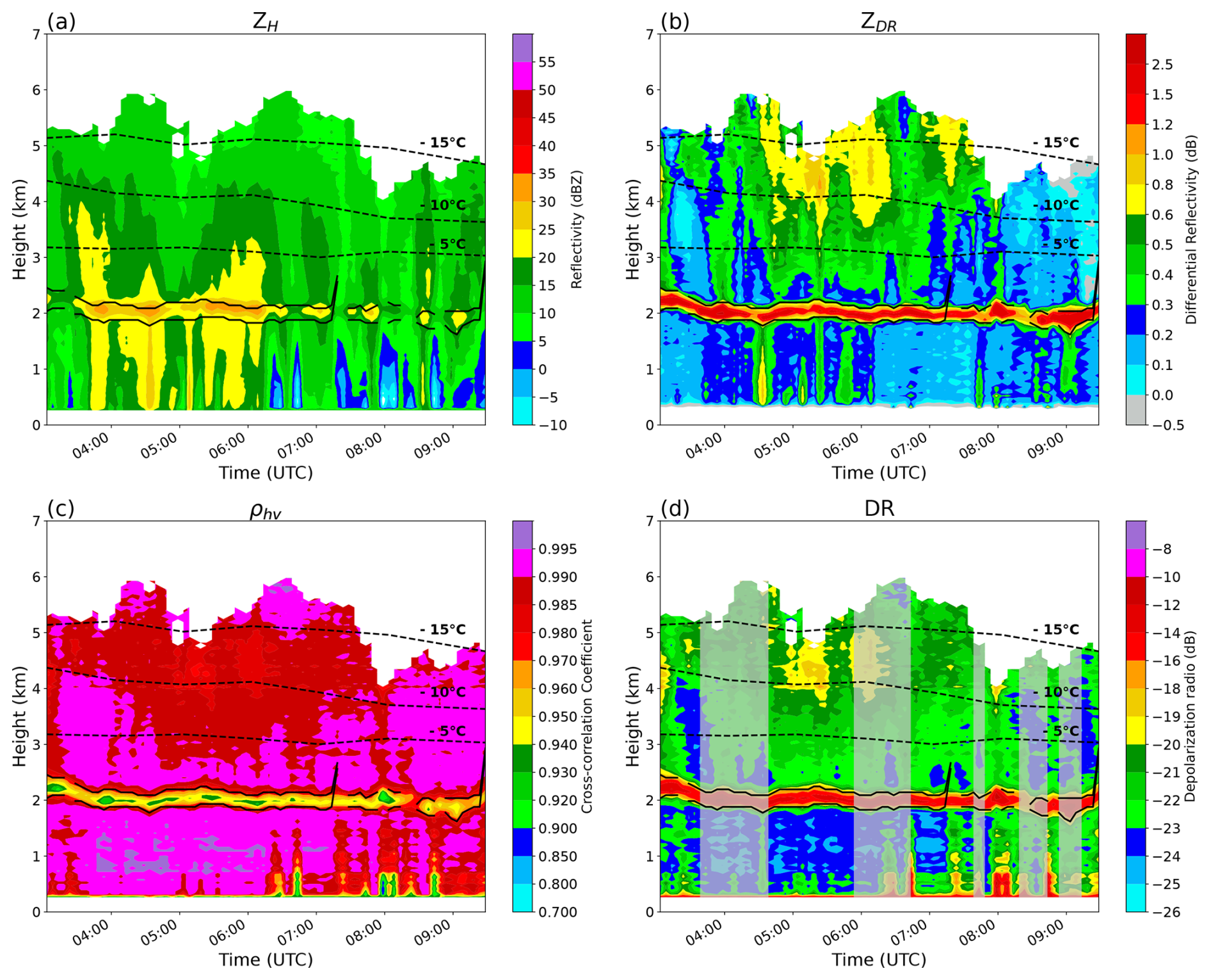
Figure 6Composite QVP of ZH (a), ZDR (b), ρhv (c), and DR (d) on 2 January 2022 between 03:00 and 09:30 UTC. Profiles were constructed from the 12° elevation angle PPI scans. Overlaid dashed lines (in all panels) display the −5, −10, and −15 °C isotherms from the European Centre for Medium-Range Weather Forecasts Reanalysis v5 (ERA5; Hersbach et al., 2020). The time periods of DR identified as saggy periods are overlaid in transparent gray.
A correlation of 0.7 between MDV, derived from the MISPs of the corresponding radar birdbath scans, and DR further emphasizes the strong potential of DR for riming detection (Fig. 7). The majority of the displayed data points are concentrated along the one-to-one line, and the high correlation between ZDR and DR of 0.9 is obvious and not surprising, as DR is a function of ZDR and ρhv. Nevertheless, DR alone is not sufficient to detect riming. Due to the dependence on ρhv, DR can exhibit quite negative values together with relatively high ZDR values not expected in the case of riming (see Figs. 4 and 7). It is also worth mentioning that, due to the inherent averaging process in the QVP technique, potential DR values dB (see Fig. 4) are not observed in our analyses.
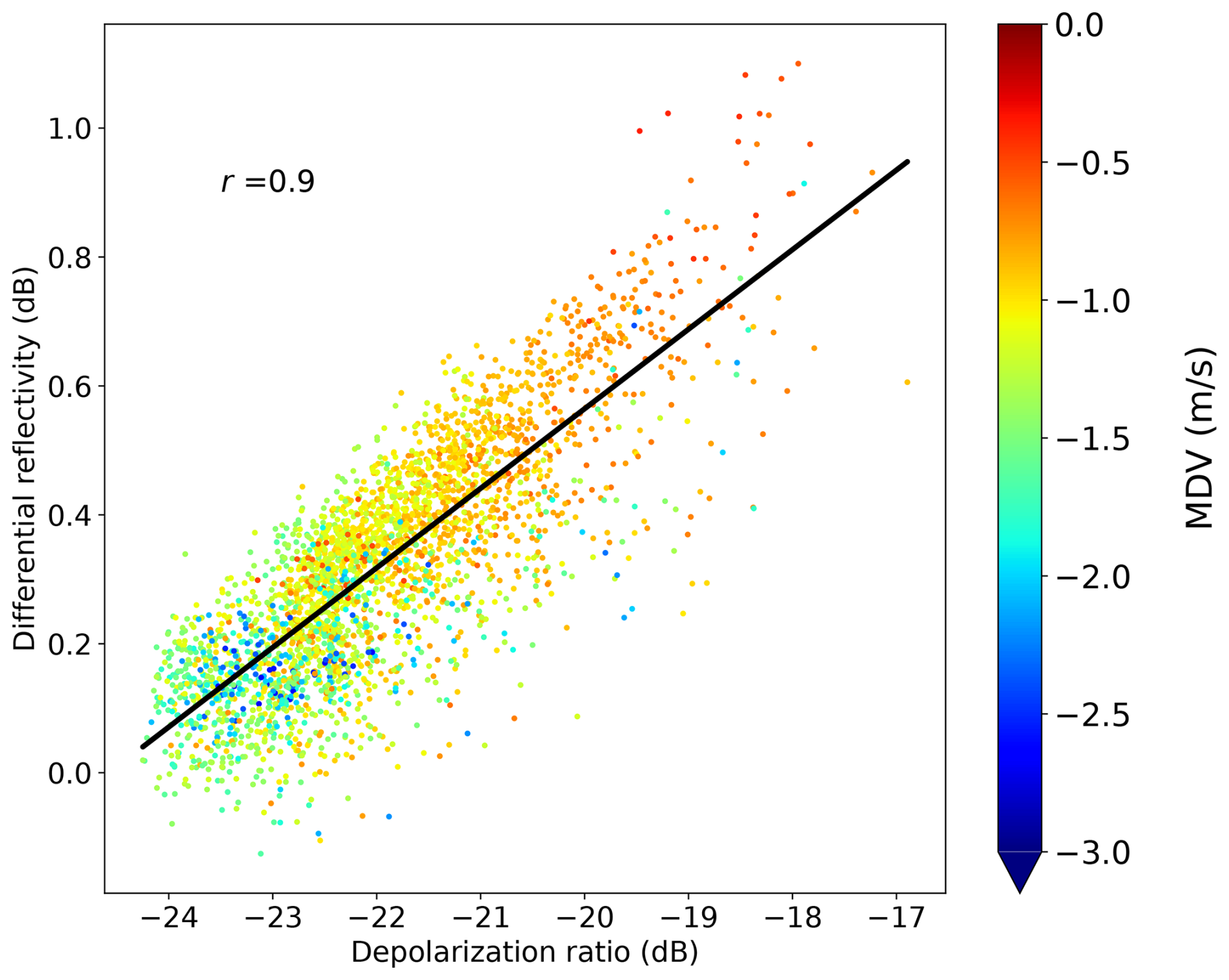
Figure 7Scatterplot and linear regression of ZDR vs. DR observed with the DWD C-band radar in Essen on 2 January 2022 between 03:00 and 09:30 UTC. The coloring of the individual data points indicates MISPs of MDV. The correlation coefficient r is provided for ZDR vs. DR.
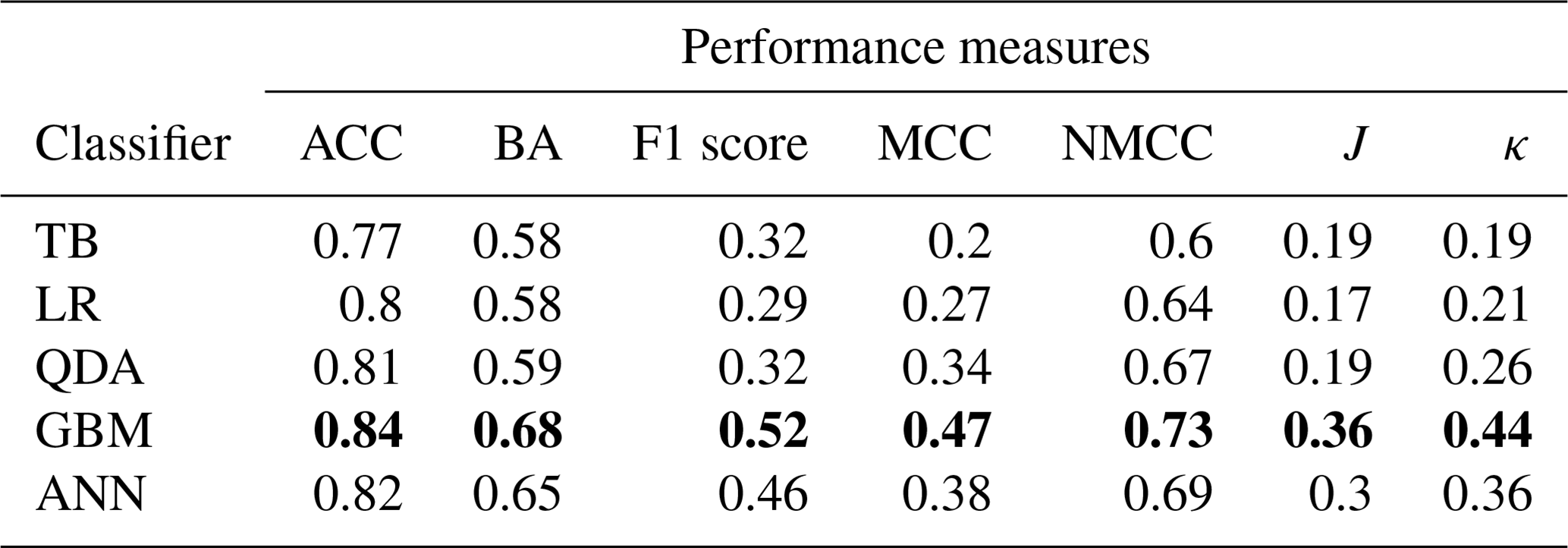
Table 4Comparative performances of TB, LR, QDA, GBM, and ANN for classification of riming. The scores refer to the performance of the methods applied to the 30 % of the hold-out data set. The best scores of each metric are shown in bold.
Secondly, based on these preliminary findings, a competition between all methods is performed for our selected test cases, i.e., the initial data set (see Table 1), monitored with DWD's ESS radar in order to identify the most appropriate algorithm for the discrimination task at hand. The extension to more test cases leads to a more robust, universally applicable algorithm that is less prone to potential minimal miscalibrations.
The evaluation of all methods as obtained with the training and validation procedure described in Sect. 4 is summarized in Table 4. The GBM-based riming retrieval outperforms all other classifiers, in terms of all performance measures. While the results of QDA and LR are comparable, the most simple TB performs slightly worse. Significantly better results than these are achieved by the ANN, which has a performance close to that of the GBM. The results highlight that choosing a learning-based method over a simple thresholding approach can significantly increase the prediction accuracy of riming. The inherent impurity-based feature importance of the winning GBM retrieval, which indicates how effective each polarimetric input variable for this specific model is, is composed of 43 % for ZH, 30 % for ZDR, and 27 % for DR. This decomposition states that ZH and ZDR can already provide a first guess of where riming may occur. Despite the relatively minor contribution of DR, it is crucial to localize and constrain these riming signatures with greater precision. This is because ZH, for instance, tends to classify artifacts that are discarded during the learning process when DR is incorporated. In addition, the three predictors are not independent and may likely contain overlapping information. This is further investigated via Shapley values below.
In order to reduce the impact of possible mismatches, the GBM-based prediction is additionally smoothed in time and height via a rolling minimum with window sizes of two. Figure 8 gives an impression of the performance of the final tuned and smoothed GBM retrieval (GBMs) applied to the complete initial input data set. Since the stratified test set is not a consecutive time series, only the application to the initial data set allows us to visualize the direct comparison of the predictions with the retrieval results during the evolution of the riming processes. In all cases investigated, the overall riming pattern is nicely represented, and the GBMs shows promising results with a balanced accuracy of 79 %, an F1 score of 0.61, and a NMCC of 0.78. Note that these metric values are better compared to the ones obtained with the hold-out validation set (Table 4), which can be explained by the smoothing and the fact that the training data have been included. Additionally, the case of 3 November 2021 (initial data set) also demonstrates the good performance of the GBMs algorithm when almost no riming is observed (Fig. 8b, f). This emphasizes that the GBM retrieval is also capable of correctly predicting the absence of riming, i.e., dominating aggregation processes.
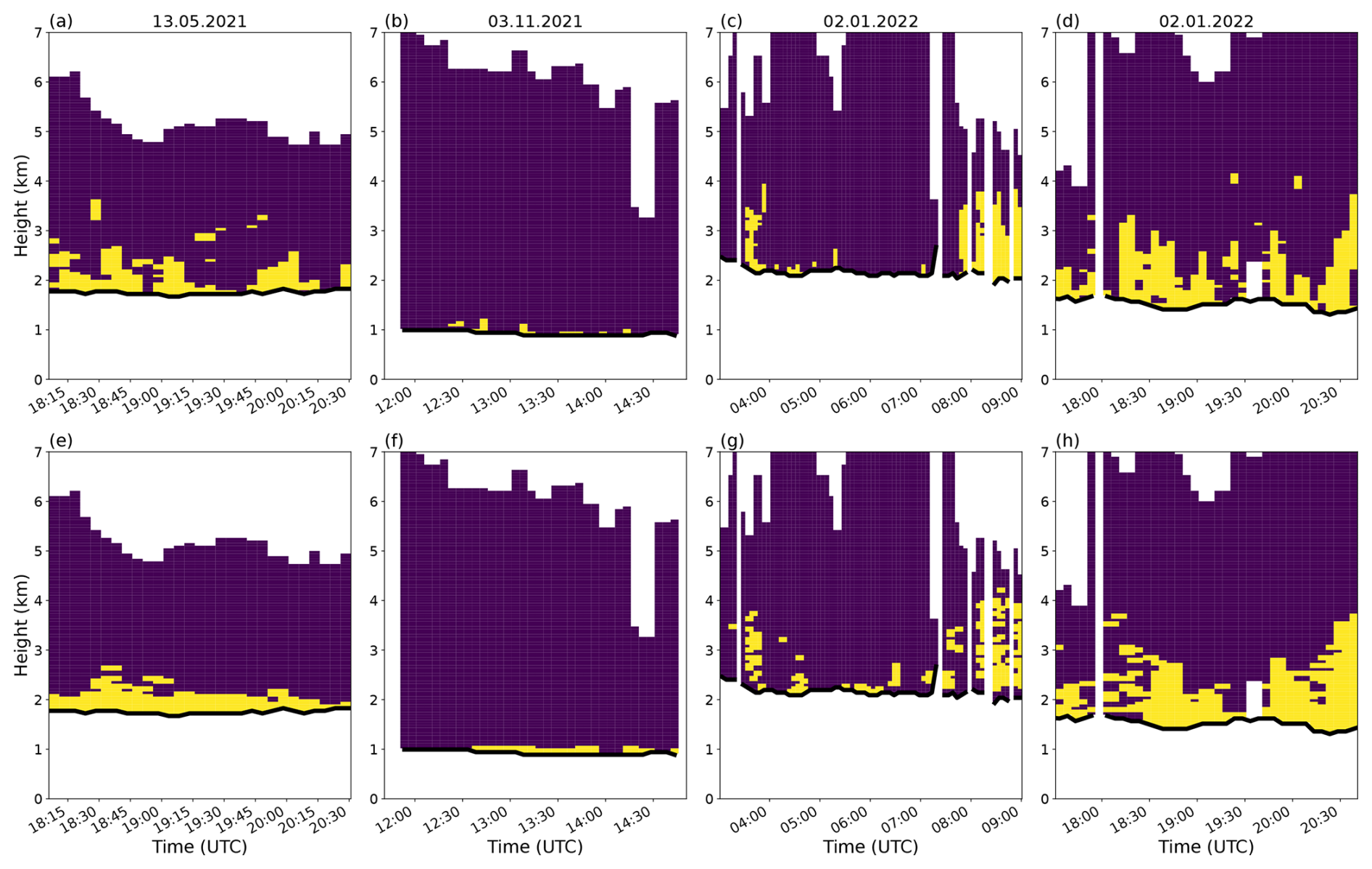
Figure 8Binary time–height plots of MDVs faster than 1.5 m s−1 (top panels, a–d) and corresponding GBMs retrieval results (bottom panels, e–h) for 13 May 2021 between 15:15 and 20:30 UTC (a, e), 3 November 2021 between 11:30 and 15:00 UTC (b, f), 2 January 2022 between 03:00 and 09:00 UTC (c, g), and 2 January 2022 between 17:00 and 21:00 UTC (d, f). (Predicted) riming is indicated in yellow, while no (predicted) riming is indicated in purple. ML tops are shown with black lines and the vertical stripes mark discarded data where no ML has been detected.
It is also interesting to look at the polarimetric input variables associated with riming prediction and the mean degree of riming. GBMs applied to the initial input data set results in a mean RMF of 0.47 with mean fall velocities of −1.66 m s−1 and corresponding mean values of DR dB, ZDR=0.27 dB, and ZH=21.2 dBZ, respectively. Moreover, periods of a sagging ML in Fig. 6d are consistent with both observed and predicted riming in Fig. 8c and d, adding another weight to the presence of faster-falling particles above the ML.
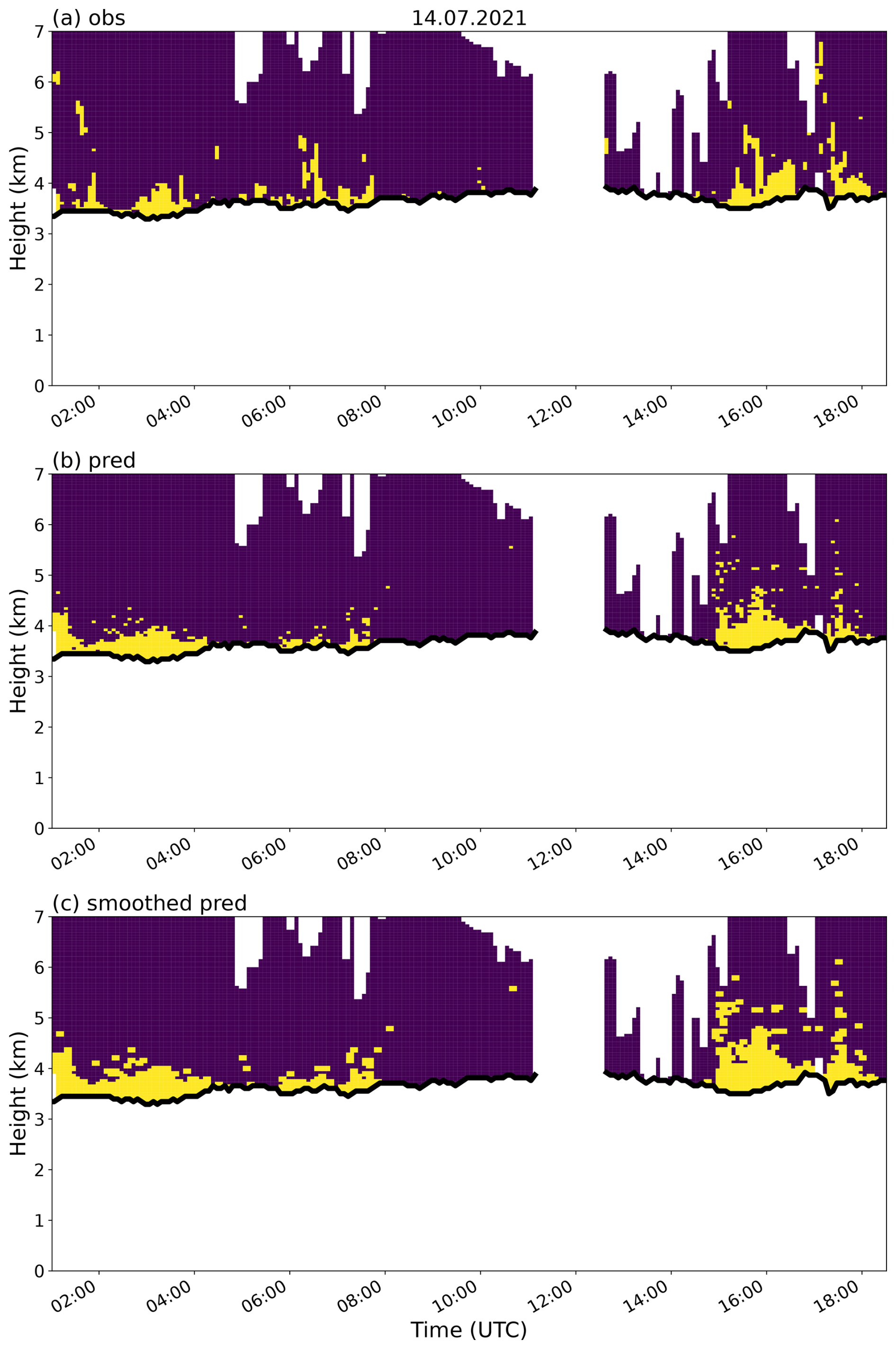
Figure 9Binary time–height plots of MDVs faster than 1.5 m s−1 (a) together with results of the GBM retrieval (b) and the GBMs retrieval (c) for the flooding case on 14 July 2021 between 01:00 and 18:30 UTC monitored with the ESS radar. Colors and black lines like in Fig. 8.
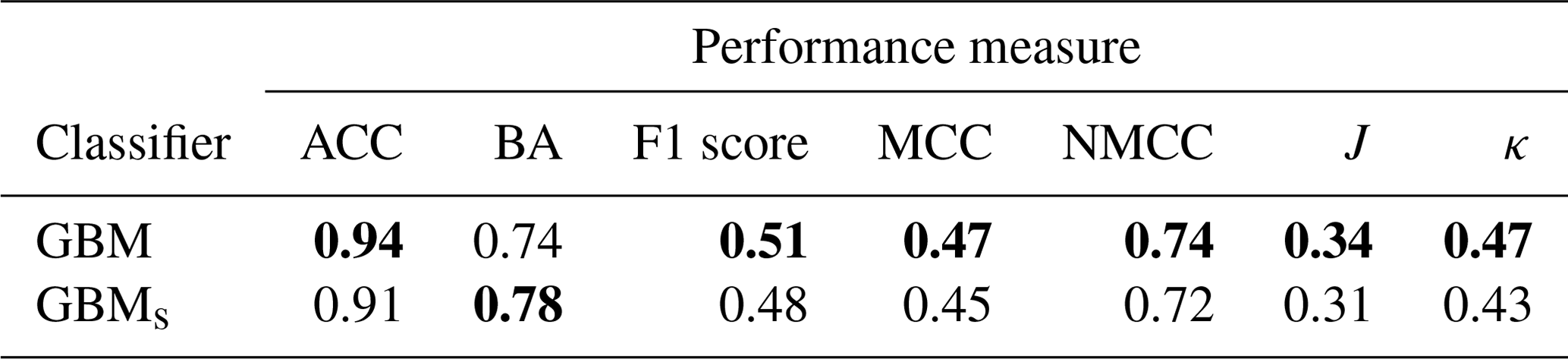
To assess the performance of the final (smoothed) GBM retrieval and to investigate the transferability of the developed retrieval method to cases for which it has not been trained or validated, it is required to consider another independent data set. Therefore, the retrieval and its smoothed variant are applied to a long-lasting intense stratiform precipitation event, which led to devastating floods especially in western Germany in the Ahr valley in Rhineland–Palatinate on 14 July 2021 (e.g., Mohr et al., 2022). The event lasting 17.5 h ranging from 01:00 to 18:30 UTC comprises a total number of 13 050 colocated data points, whereas 20 % are labeled as riming and 80 % as no-riming. The predictions show convincing results (Table 5). The overall performance of the GBM algorithm is better or equal when compared to the performance of the GBM applied to the hold-out data set, except for the metric of F1 score (0.52 vs. 0.51) and J (0.36 vs. 0.34), for which nevertheless very similar values were obtained. This underlines the robustness of the GBM retrieval. When comparing the metrics of the GBM to GBMs, the smoothed variant performs only better in terms of BA (74 % vs. 78 %). In general, the GBMs tends to overestimate riming occurrences, but at the same time the amount of TP increases and the amount of FN decreases. This leads to the conclusion that smoothing, which resulted in a better prediction of the GBM applied to the initial complete data set, is not necessary for the independent data set but also causes hardly any loss of performance. Both classifiers, GBM and GBMs, reproduce the overall riming patterns nicely (Fig. 9).
For the Ahr valley flooding event, the GBM retrieval is able to detect riming with a mean RMF of 0.43. Following Kneifel and Moisseev (2020), this corresponds to a fall velocity of approximately −1.45 m s−1 at C-band derived via the RMF-MDV polynomial fit in the Rayleigh regime. Moreover, the predicted data points exhibit mean values of DR dB, ZDR=0.3 dB, and ZH=21.48 dBZ. These values for ZH and ZDR again correspond to the expected signatures for faster-falling particles, which tend to enhance the ZH and decrease the ZDR above the ML. The lower mean ZDR values are in line with riming signatures of particles that become more spherical, resulting in a lower ZDR by 0.1–0.3 dB (Ryzhkov et al., 2016; Kumjian et al., 2016; Giangrande et al., 2016; Vogel et al., 2015). The mean MDV of all data points is −0.85 m s−1, while the mean MDV for all points where riming is predicted is −1.51 m s−1.
Even though the spatiotemporal mismatches caused by the comparison of a 15 s snapshot of the vertical atmospheric column with the average profile of a conical volume may lead to double penalties (Gilleland et al., 2009) affecting the scores, the developed GBM algorithm overall distinguishes reliably between dominant aggregation and intense riming processes.
Table 5Metrics for the best-performing GBM riming algorithm before and after smoothing (GBMs). Scores refer to the performance applied to the independent data set. The best scores of each metric are highlighted in bold.
As the GBM generally provides the most accurate results, the Shapley values ψ are estimated for all unsmoothed GBM models and for each parameter combination. This is conducted on both the independent and the complete initial data set. Thus, calculations are performed for a set of six different combinations for both data sets, whereby the GBM models using a combination of two polarimetric variables or only one alone had to be retrained for their respective hyperparameters.
Table 6Shapley values ψ and their decomposition (listed in parenthesis in %) for the independent and initial data set. NMCC has been considered the metric for calculating the Shapley values.
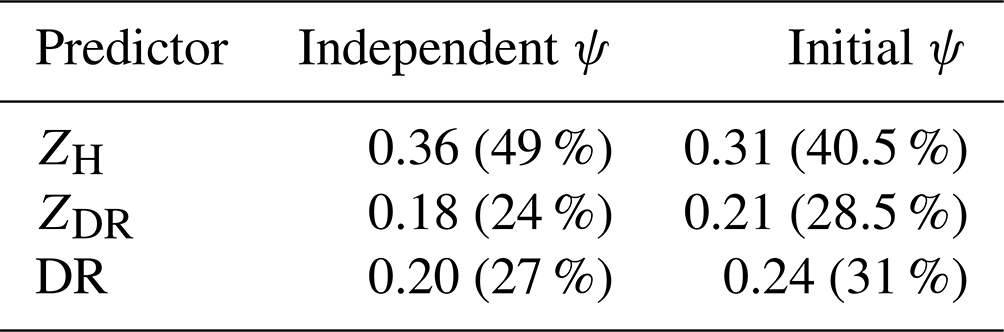
From the analyses of the Shapley values on the independent data set, ZH emerges as the top predictor with an importance of 49 %, followed by DR with 27 % (Table 6). DR has a higher impact than ZDR (24 %), but the difference is not significant. Other metrics, e.g., BA, also show a fairly balanced importance of DR and ZDR (not shown). Interestingly, considering the true negative rate (TNR), the Shapley values indicate that DR has the largest influence at 37 %. This may be due to the ability of DR to limit the tendency of ZH to overpredict riming.
The Shapley values calculated for the initial data set show similar results as for the independent data set, also matching well with respect to the ranking of the predictors. However, a slightly higher importance of the variables DR (31 % vs. 27 %) and ZDR (28.5 % vs. 24 %) has been obtained. One potential reason for the greater impact of DR could be the presence of more intense and deep riming signatures in the initial data set, e.g., on 2 January 2022. Thus, learning these distinct riming features from DR alone was possible, but not from ZH (not shown). Ultimately, the GBM retrieval using all three polarimetric variables outperforms the GBM models using just one or a combination of two for the independent data set. This indicates that the predictors employed improve each other.
In its final form, the novel algorithm performs well for all tested cases and is particularly encouraging in that it can be easily implemented in operational services for area-wide applications. This algorithm could be applied to identify dominant riming conditions that pose a potential icing hazard to aviation. Although the final algorithm cannot be expressed as a simple equation because it is based on an ensemble of trees, it can be provided upon request as a stored ready-to-use model. In addition, the algorithm also enables the creation of a Germany-wide climatology of riming pre-2021, when no Doppler spectra were stored.
The overarching goal of this study was to develop an algorithm which enables the distinction between rimed and aggregated snow based on polarimetric weather radar data alone. The introduced riming detection algorithm delivers promising results, requires few computational resources, and bears worldwide opportunities and advantages such as applicability to any slant-viewing polarimetric weather surveillance radar, even those without a vertical-scanning strategy.
Tests with widely used binary scores identified the GBM algorithm as the one with the best performance. When considering predictive BA for an independent case, the trained GBM riming retrieval was able to correctly predict about 74 % of observed riming features and thus gives confidence to the detection of area-wide riming based on operational national radar networks. The underlying assumption is that the polarimetric riming signature is dominating in the resolved radar volume and not obscured by other ice particle types. Another challenge is that small-scale riming features may be obscured or reduced in magnitude due to the inherent averaging procedure in the QVP technique.
The Shapley values highlight the to-date underutilized DR estimator as a crucial contribution for the riming detection algorithm. However, a well-calibrated ZDR is required as input as well as noise-corrected ρhv to ensure the reliability of DR.
The algorithm was built on a limited number of training data sets and from the ESS radar only. In the future, a comprehensive climatological training data set that considers more radar stations and an even wider range of meteorological conditions will enable us to increase robustness and to further improve the performance of the GBM retrieval. However, building such a data set is challenging, because the fully automated post-processing chain of the Doppler spectra can still fail under extreme precipitation conditions and thus must be replaced by a simpler manual thresholding method, resulting in increased computational time and cumbersome effort. Such an extended database would also allow, in the next logical step, for the separation of fall speeds into several groups in order to learn multiple riming classes, such as moderate riming, heavy riming, and potentially a graupel class characterized by fall velocities of up to 3 m s−1. Similar to the envisioned different riming classes in a future refinement of the algorithm, distinct classes for the aggregation process could also be introduced. Towards this goal, the vertical gradient of ZH above the ML () could be included as an additional input variable to the classifier.
The applicability of the algorithm to radars operating at different wavelengths, such as for the operational S-band radar network of the National Weather Service (NWS) in the United States, also remains to be investigated and validated in the future. Mechanical constraints do not allow for the implementation of a birdbath scanning routine in the scan schedule, as 20° is the largest elevation angle used (Matrosov, 2020) in the NWS network, requiring the use of alternative measurements as ground truth. The ongoing extension of the NWS network, with gap-filler radars operating at X- and C-band led by the private company ClimaVision in the United States, should allow for the direct application of our algorithm to at least their C-band radars. Deploying the riming detection algorithm across radar networks in different climatic regions could potentially also prove beneficial in gaining a deeper understanding of the importance of riming in the formation and evolution of precipitating clouds.
The radar signatures in QVPs, as used in this study, reveal the dominating precipitation process within the monitored radar domain (with a projected range of approximately 34 km for QVPs of 12°). A next potential extension would be to explore the possibility to also identify smaller-scale riming conditions via columnar vertical profiles (Murphy et al., 2020), process-oriented vertical profiles (Hu et al., 2023), or range height indicator sector vertical profiles (Blanke et al., 2023). Additional aircraft in situ measurements of particle size distributions and the particle habits over the DWD C-band network domain would enable an even more detailed accuracy assessment and evaluation of potential applications of such extensions of the algorithm. Such coincident data could facilitate the development of an algorithm that also directly quantifies the degree of riming. As already outlined in Sect. 2.2, larger particles would fall faster than smaller particles with the same degree of riming; thus, it is challenging to decouple the effects of particle size and riming on MDV. Therefore, a strict MDV threshold may not be universal, but again, an in situ database would help and allow for a decoupled approach.
Finally, the riming detection algorithm is also of value for the evaluation of numerical weather prediction models and data assimilation. For example, the benefit of state-of-the-art ice microphysical retrievals for these applications is currently investigated (e.g., Reimann et al., 2023; Trömel et al., 2021, 2023), but most retrievals show reduced accuracy in the presence of riming. The novel riming detection algorithm could therefore be used to just mask those regions or even replace, in riming conditions, current retrievals by upcoming developments taking frim into account (Alexander V. Ryzhkov, personal communication, 2024). Nonetheless, this study already illustrates the key components and capabilities of a solely radar-based riming detection algorithm, without any additional aids like vertically pointing devices.
The code is available upon request by contacting the authors.
To obtain DWD radar volume data and birdbath data including Doppler spectra, please contact DWD customer relations at kundenservice@dwd.de, following DWD regulations. The ERA5 data are stored at the Climate Data Store from the ECMWF and are accessible via https://doi.org/10.24381/cds.bd0915c6 (Hersbach et al., 2023).
AB and ST jointly designed the study. AB led the writing, created the visualizations, and carried out the analysis and data handling. ST helped in the analysis process. MG provided scientific expertise on Doppler spectra and contributed to their analysis. All authors contributed to the proofreading of the final draft.
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
This article is part of the special issue “Fusion of radar polarimetry and numerical atmospheric modelling towards an improved understanding of cloud and precipitation processes (ACP/AMT/GMD inter-journal SI)”. It is not associated with a conference.
The research was carried out in the framework of the special priority program SPP-2115 “Polarimetric Radar Observations meet Atmospheric Modelling (PROM)” in the project POLICE. The C-band weather radar data from the Essen radar were provided by the German national meteorological service (Deutscher Wetterdienst, DWD). We acknowledge the support of Kai Mühlbauer and the open-source radar library ωradlib (https://docs.wradlib.org/en/2.0.0/, last access: 17 October 2024) regarding the processing of radar data.
This research has been supported by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) (project nos. 408014771 and 408012686).
This open-access publication was funded by the University of Bonn.
This paper was edited by Ivy Tan and reviewed by two anonymous referees.
Bergeron, T.: On the physics of clouds and precipitation, Proces Verbaux de l’Association de Météorologie, International Union of Geodesy and Geophysics, 156 pp., 156–180, 1935. a
Billault-Roux, A.-C., Georgakaki, P., Gehring, J., Jaffeux, L., Schwarzenboeck, A., Coutris, P., Nenes, A., and Berne, A.: Distinct secondary ice production processes observed in radar Doppler spectra: insights from a case study, Atmos. Chem. Phys., 23, 10207–10234, https://doi.org/10.5194/acp-23-10207-2023, 2023. a
Blanke, A., Heymsfield, A. J., Moser, M., and Trömel, S.: Evaluation of polarimetric ice microphysical retrievals with OLYMPEX campaign data, Atmos. Meas. Tech., 16, 2089–2106, https://doi.org/10.5194/amt-16-2089-2023, 2023. a, b
Breiman, L.: Bagging predictors, Mach. Learn., 24, 123–140, https://doi.org/10.1007/BF00058655, 1996. a
Breiman, L.: Random forests, Mach. Learn., 45, 5–32, https://doi.org/10.1023/A:1010933404324, 2001. a, b
Buschow, S., Keller, J., and Wahl, S.: Explaining heatwaves with machine learning, Q. J. Roy. Meteor. Soc., 150, 1207–1221, https://doi.org/10.1002/qj.4642, 2024. a
Carlin, J. T. and Ryzhkov, A. V.: Estimation of melting-layer cooling rate from dual-polarization radar: Spectral bin model simulations, J. Appl. Meteorol. Climatol., 58, 1485–1508, https://doi.org/10.1175/JAMC-D-18-0343.1, 2019. a
Chase, R. J., Harrison, D. R., Burke, A., Lackmann, G. M., and McGovern, A.: A machine learning tutorial for operational meteorology. Part I: Traditional machine learning, Weather Forecast., 37, 1509–1529, https://doi.org/10.1175/WAF-D-22-0070.1, 2022. a
DeLaFrance, A., McMurdie, L. A., Rowe, A. K., and Conrick, R.: Effects of Riming on Ice-Phase Precipitation Growth and Transport Over an Orographic Barrier, J. Adv. Model. Earth Sy., 16, e2023MS003778, https://doi.org/10.1029/2023MS003778, 2024. a
Donaldson, R. J., Dyer, R. M., and Kraus, M. J.: Operational benefits of meteorological Doppler radar, Vol. 75, Air Force Systems Command, United, Air Force Cambridge Research Laboratories (AFCRL), Tech. Rep., AFCRL-TR-75-0103, 25 pp., https://apps.dtic.mil/sti/trecms/pdf/ADA010434.pdf (last access: 25 October 2024), 1975. a
Ellis, S., Serke, D., Hubbert, J., Albo, D., Weekley, A., and Politovich, M.: Towards the detection of aircraft icing conditions using operational dual-polarimetric radar, in: 7th European Radar Conference on Radar in Meteorology and Hydrology, 25–29 June 2012, Toulouse, France, 24–29, 2012. a
Fabry, F.: Radar Meteorology: Principles and Practice, Cambridge University Press, https://doi.org/10.1017/CBO9781107707405, 2015. a
Field, P. R., Lawson, R. P., Brown, P. R., Lloyd, G., Westbrook, C., Moisseev, D., Miltenberger, A., Nenes, A., Blyth, A., Choularton, T., Connolly, P., Buehl, J., Crosier, J., Cui, Z., Dearden, C., DeMott, P., Flossmann, A., Heymsfield, A., Huang, Y., Kalesse, H., Kanji, Z. A., Korolev, A., Kirchgaessner, A., Lasher-Trapp, S., Leisner, T., McFarquhar, G., Phillips, V., Stith, J., and Sullivan, S.: Secondary ice production: Current state of the science and recommendations for the future, Meteorol. Monogr., 58, 7–1, https://doi.org/10.1175/AMSMONOGRAPHS-D-16-0014.1, 2017. a
Findeisen, Z.: Kolloid-meteorologische Vorgänge bei Niederschlagsbildung, Meteorol. Z., 55, 121–133, 1938. a
Frech, M. and Hubbert, J.: Monitoring the differential reflectivity and receiver calibration of the German polarimetric weather radar network, Atmos. Meas. Tech., 13, 1051–1069, https://doi.org/10.5194/amt-13-1051-2020, 2020. a
Frech, M., Hagen, M., and Mammen, T.: Monitoring the absolute calibration of a polarimetric weather radar, J. Atmos. Ocean. Tech., 34, 599–615, https://doi.org/10.1175/JTECH-D-16-0076.1, 2017. a
Friedman, J. H.: Greedy function approximation: a gradient boosting machine, Ann. Statistics, 29, 1189–1232, 2001. a, b
Geisser, S.: Posterior odds for multivariate normal classifications, J. Roy. Stat. Soc. B, 26, 69–76, https://doi.org/10.1111/j.2517-6161.1964.tb00540.x, 1964. a, b
Gergely, M., Schaper, M., Toussaint, M., and Frech, M.: Doppler spectra from DWD's operational C-band radar birdbath scan: sampling strategy, spectral postprocessing, and multimodal analysis for the retrieval of precipitation processes, Atmos. Meas. Tech., 15, 7315–7335, https://doi.org/10.5194/amt-15-7315-2022, 2022. a, b
Giangrande, S. E., Krause, J. M., and Ryzhkov, A. V.: Automatic designation of the melting layer with a polarimetric prototype of the WSR-88D radar, J. Appl. Meteorol. Climatol., 47, 1354–1364, https://doi.org/10.1175/2007JAMC1634.1, 2008. a
Giangrande, S. E., Toto, T., Bansemer, A., Kumjian, M. R., Mishra, S., and Ryzhkov, A. V.: Insights into riming and aggregation processes as revealed by aircraft, radar, and disdrometer observations for a 27 April 2011 widespread precipitation event, J. Geophys. Res.-Atmos., 121, 5846–5863, https://doi.org/10.1002/2015JD024537, 2016. a
Gilleland, E., Ahijevych, D., Brown, B. G., Casati, B., and Ebert, E. E.: Intercomparison of spatial forecast verification methods, Weather Forecast., 24, 1416–1430, https://doi.org/10.1175/2009WAF2222269.1, 2009. a
Grömping, U.: Variable importance assessment in regression: linear regression versus random forest, Am. Stat., 63, 308–319, https://doi.org/10.1198/tast.2009.08199, 2009. a
Hallett, J. and Mossop, S.: Production of secondary ice particles during the riming process, Nature, 249, 26–28, https://doi.org/10.1038/249026a0, 1974. a
Heidke, P.: Berechnung des Erfolges und der Güte der Windstärkevorhersagen im Sturmwarnungsdienst, Geografiska Annaler, 8, 301–349, https://doi.org/10.1080/20014422.1926.11881138, 1926. a
Helmert, K., Tracksdorf, P., Steinert, J., Werner, M., Frech, M., Rathmann, N., Hengstebeck, T., Mott, M., Schumann, S., and Mammen, T.: DWDs new radar network and post-processing algorithm chain, in: Proc. Eighth European Conf. on Radar in Meteorology and Hydrology (ERAD 2014), Garmisch-Partenkirchen, Germany, DWD and DLR, 4, 1–5, 2014. a
Hersbach, H., Bell, B., Berrisford, P., et al.: The ERA5 global reanalysis, Q. J. Roy. Meteor. Soc., 146, 1999–2049, https://doi.org/10.1002/qj.3803, 2020. a
Hersbach, H., Bell, B., Berrisford, P., Biavati, G., Horányi, A., Muñoz Sabater, J., Nicolas, J., Peubey, C., Radu, R., Rozum, I., Schepers, D., Simmons, A., Soci, C., Dee, D., and Thépaut, J.-N.: ERA5 hourly data on pressure levels from 1940 to present, Copernicus Climate Change Service (C3S) Climate Data Store (CDS) [data set], https://doi.org/10.24381/cds.bd0915c6, 2023. a
Heymsfield, A. J.: A comparative study of the rates of development of potential graupel and hail embryos in high plains storms, J. Atmos. Sci., 39, 2867–2897, https://doi.org/10.1175/1520-0469(1982)039<2867:ACSOTR>2.0.CO;2, 1982. a
Heymsfield, A. J., Schmitt, C., and Bansemer, A.: Ice cloud particle size distributions and pressure-dependent terminal velocities from in situ observations at temperatures from 0 to- 86 C, J. Atmos. Sci., 70, 4123–4154, https://doi.org/10.1175/JAS-D-12-0124.1, 2013. a
Hogan, R. J., Francis, P., Flentje, H., Illingworth, A., Quante, M., and Pelon, J.: Characteristics of mixed-phase clouds. I: Lidar, radar and aircraft observations from CLARE'98, Q. J. Roy. Meteor. Soc., 129, 2089–2116, https://doi.org/10.1256/rj.01.208, 2003. a
Hu, J., Zhang, P., and Ryzhkov, A.: Decoding Cloud Microphysics: A Study Using the Innovative Process-Oriented Vertical Profile (POVP) Technique with WSR-88D Radar Observations, in: AGU Fall Meeting Abstracts, 2023, A24B–08, 2023. a
Jaccard, P.: Distribution de la flore alpine dans le bassin des Dranses et dans quelques régions voisines, Bull. Soc. Vaudoise Sci. Nat., 37, 241–272, 1901. a
Kalesse, H., Szyrmer, W., Kneifel, S., Kollias, P., and Luke, E.: Fingerprints of a riming event on cloud radar Doppler spectra: observations and modeling, Atmos. Chem. Phys., 16, 2997–3012, https://doi.org/10.5194/acp-16-2997-2016, 2016. a
Karrer, M., Seifert, A., Siewert, C., Ori, D., von Lerber, A., and Kneifel, S.: Ice particle properties inferred from aggregation modelling, J. Adv. Model. Earth Sy., 12, e2020MS002066, https://doi.org/10.1029/2020MS002066, 2020. a
Kneifel, S. and Moisseev, D.: Long-term statistics of riming in nonconvective clouds derived from ground-based Doppler cloud radar observations, J. Atmos. Sci., 77, 3495–3508, https://doi.org/10.1175/JAS-D-20-0007.1, 2020. a, b, c, d
Kollias, P., Miller, M. A., Luke, E. P., Johnson, K. L., Clothiaux, E. E., Moran, K. P., Widener, K. B., and Albrecht, B. A.: The Atmospheric Radiation Measurement Program cloud profiling radars: Second-generation sampling strategies, processing, and cloud data products, J. Atmos. Ocean. Tech., 24, 1199–1214, https://doi.org/10.1175/JTECH2033.1, 2007. a
Kumjian, M. R.: The impact of precipitation physical processes on the polarimetric radar variables, in: Ph.D. dissertation, 327–328, The University of Oklahoma, Norman Campus, OK, USA, https://hdl.handle.net/11244/319188 (last access: 25 January 2024), 2012. a
Kumjian, M. R., Mishra, S., Giangrande, S. E., Toto, T., Ryzhkov, A. V., and Bansemer, A.: Polarimetric radar and aircraft observations of saggy bright bands during MC3E, J. Geophys. Res.-Atmos., 121, 3584–3607, https://doi.org/10.1002/2015JD024446, 2016. a, b, c
Kumjian, M. R., Prat, O. P., Reimel, K. J., van Lier-Walqui, M., and Morrison, H. C.: Dual-polarization radar fingerprints of precipitation physics: A review, Remote Sens., 14, 3706, https://doi.org/10.3390/rs14153706, 2022. a, b
Locatelli, J. D. and Hobbs, P. V.: Fall speeds and masses of solid precipitation particles, J. Geophys. Res., 79, 2185–2197, https://doi.org/10.1029/JC079i015p02185, 1974. a, b
Maahn, M., Moisseev, D., Steinke, I., Maherndl, N., and Shupe, M. D.: Introducing the Video In Situ Snowfall Sensor (VISSS), Atmos. Meas. Tech., 17, 899–919, https://doi.org/10.5194/amt-17-899-2024, 2024. a
Matrosov, S. Y.: Depolarization estimates from linear H and V measurements with weather radars operating in simultaneous transmission–simultaneous receiving mode, J. Atmos. Ocean. Tech., 21, 574–583, https://doi.org/10.1175/1520-0426(2004)021<0574:DEFLHA>2.0.CO;2, 2004. a
Matrosov, S. Y.: Ice hydrometeor shape estimations using polarimetric operational and research radar measurements, Atmosphere, 11, 97, https://doi.org/10.3390/atmos11010097, 2020. a, b
Matrosov, S. Y.: Frozen Hydrometeor Terminal Fall Velocity Dependence on Particle Habit and Riming as Observed by Vertically Pointing Radars, J. Appl. Meteorol. Climatol., 62, 1023–1038, https://doi.org/10.1175/JAMC-D-23-0002.1, 2023. a
Matthews, B. W.: Comparison of the predicted and observed secondary structure of T4 phage lysozyme, Biochim. Biophys. Acta (BBA)-Protein Structure, 405, 442–451, https://doi.org/10.1016/0005-2795(75)90109-9, 1975. a
Milani, Z. R., Matida, E., Razavi, F., Ronak Sultana, K., Timothy Patterson, R., Nichman, L., Benmeddour, A., and Bala, K.: Numerical Icing Simulations of Cylindrical Geometry and Comparisons to Flight Test Results, J. Aircraft, 61, 1–11, https://doi.org/10.2514/1.C037682, 2024. a
Miller, G. A. and Nicely, P. A.: An analysis of perceptual confusions among some English consonants, J. Acoust. Soc. Amer., 27, 338–352, https://doi.org/10.1121/1.1907526, 1955. a
Mohr, S., Ehret, U., Kunz, M., Ludwig, P., Caldas-Alvarez, A., Daniell, J. E., Ehmele, F., Feldmann, H., Franca, M. J., Gattke, C., Hundhausen, M., Knippertz, P., Küpfer, K., Mühr, B., Pinto, J. G., Quinting, J., Schäfer, A. M., Scheibel, M., Seidel, F., and Wisotzky, C.: A multi-disciplinary analysis of the exceptional flood event of July 2021 in central Europe – Part 1: Event description and analysis, Nat. Hazards Earth Syst. Sci., 23, 525–551, https://doi.org/10.5194/nhess-23-525-2023, 2023. a
Mosimann, L.: An improved method for determining the degree of snow crystal riming by vertical Doppler radar, Atmos. Res., 37, 305–323, https://doi.org/10.1016/0169-8095(94)00050-N, 1995. a
Murphy, A. M., Ryzhkov, A., and Zhang, P.: Columnar vertical profile (CVP) methodology for validating polarimetric radar retrievals in ice using in situ aircraft measurements, J. Atmos. Ocean. Tech., 37, 1623–1642, https://doi.org/10.1175/JTECH-D-20-0011.1, 2020. a
Pearson, K.: Mathematical Contributions to the Theory of Evolution, XIII: On the Theory of Contingency and Its Relation to Association and Normal Correlation, vol. I of Drapers' Company research memoirs, Biometric series, Cambridge University Press, https://books.google.de/books?id=HbAvygEACAAJ (last access: 7 September 2024), 1904. a
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V., Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P., Weiss, R., Dubourg, V., Vanderplas, J., Passos, A., Cournapeau, D., Brucher, M., Perrot, M., and Duchesnay, E.: Scikit-learn: Machine learning in Python, J. Mach. Learn. Res., 12, 2825–2830, https://doi.org/10.48550/arXiv.1201.0490, 2011. a
Reimann, L., Simmer, C., and Trömel, S.: Assimilation of 3D polarimetric microphysical retrievals in a convective-scale NWP system, Atmos. Chem. Phys., 23, 14219–14237, https://doi.org/10.5194/acp-23-14219-2023, 2023. a
Ryzhkov, A., Zhang, P., Reeves, H., Kumjian, M., Tschallener, T., Trömel, S., and Simmer, C.: Quasi-vertical profiles – A new way to look at polarimetric radar data, J. Atmos. Ocean. Tech., 33, 551–562, https://doi.org/10.1175/JTECH-D-15-0020.1, 2016. a, b, c, d
Ryzhkov, A., Matrosov, S. Y., Melnikov, V., Zrnic, D., Zhang, P., Cao, Q., Knight, M., Simmer, C., and Troemel, S.: Estimation of depolarization ratio using weather radars with simultaneous transmission/reception, J. Appl. Meteorol. Climatol., 56, 1797–1816, https://doi.org/10.1175/JAMC-D-16-0098.1, 2017. a, b, c, d, e
Ryzhkov, A. V. and Zrnić, D. S.: Radar Polarimetry for Weather Observations, vol. 486, Springer, https://doi.org/10.1007/978-3-030-05093-1, 2019. a, b, c, d, e
Schmidhuber, J.: Deep learning in neural networks: An overview, Neural networks, 61, 85–117, https://doi.org/10.1016/j.neunet.2014.09.003, 2015. a
Schultz, M. G., Betancourt, C., Gong, B., Kleinert, F., Langguth, M., Leufen, L. H., Mozaffari, A., and Stadtler, S.: Can deep learning beat numerical weather prediction?, Philos. T. Roy. Soc. A, 379, 20200097, https://doi.org/10.1098/rsta.2020.0097, 2021. a
Serke, D., Hubbert, J., Ellis, S., Reehorst, A., Kennedy, P., Albo, D., WEEkLEY, A., and Politovich, M.: The winter 2010 FRONT/NIRSS in-flight icing detection field campaign, in: 35th Conference on Radar Meteorology, 26–30 September 2011, Pittsburgh, PA, Am. Meteorol. Soc., https://ams.confex.com/ams/35Radar/webprogram/Paper192007.html (last access: 7 March 2024), 2011. a
Shapley, L. S.: A value for n-person games, in: Contributions to the Theory of Games, edited by: Kuhn, H. W. and Tucker, A. W., 307–318, Princeton University Press, https://doi.org/10.1515/9781400881970-018, 1953. a
Trömel, S., Kumjian, M. R., Ryzhkov, A. V., Simmer, C., and Diederich, M.: Backscatter differential phase – Estimation and variability, J. Appl. Meteorol. Climatol., 52, 2529–2548, https://doi.org/10.1175/JAMC-D-13-0124.1, 2013. a
Trömel, S., Simmer, C., Blahak, U., Blanke, A., Doktorowski, S., Ewald, F., Frech, M., Gergely, M., Hagen, M., Janjic, T., Kalesse-Los, H., Kneifel, S., Knote, C., Mendrok, J., Moser, M., Köcher, G., Mühlbauer, K., Myagkov, A., Pejcic, V., Seifert, P., Shrestha, P., Teisseire, A., von Terzi, L., Tetoni, E., Vogl, T., Voigt, C., Zeng, Y., Zinner, T., and Quaas, J.: Overview: Fusion of radar polarimetry and numerical atmospheric modelling towards an improved understanding of cloud and precipitation processes, Atmos. Chem. Phys., 21, 17291–17314, https://doi.org/10.5194/acp-21-17291-2021, 2021. a, b
Trömel, S., Blahak, U., Evaristo, R., Mendrok, J., Neef, L., Pejcic, V., Scharbach, T., Shresta, P., and Simmer, C.: Fusion of radar polarimetry and atmospheric modelling, Chapter 7 in Advances in Weather Radar Volume 2: Precipitation science, scattering and processing algorithms, SciTech Publishing, ISBN 9781839536243, https://doi.org/10.1049/SBRA557G_ch7, 2023. a
Vogel, J. M., Fabry, F., and Zawadzki, I.: Attempts to observe polarimetric signatures of riming in stratiform precipitation., 37th Conf. on Radar Meteorology, 15 September 2015, Norman, OK, Amer. Meteor. Soc., 6B.6., https://ams.confex.com/ams/ (last access: 12 March 2024), 2015. a, b
von Terzi, L., Dias Neto, J., Ori, D., Myagkov, A., and Kneifel, S.: Ice microphysical processes in the dendritic growth layer: a statistical analysis combining multi-frequency and polarimetric Doppler cloud radar observations, Atmos. Chem. Phys., 22, 11795–11821, https://doi.org/10.5194/acp-22-11795-2022, 2022. a
Wang, G., Ruser, H., Schade, J., Passig, J., Adam, T., Dollinger, G., and Zimmermann, R.: Machine learning approaches for automatic classification of single-particle mass spectrometry data, Atmos. Meas. Tech., 17, 299–313, https://doi.org/10.5194/amt-17-299-2024, 2024. a
Wegener, A.: Thermodynamik der Atmosphäre, Nature, 90, 31–31, https://doi.org/10.1038/090031a0, 1912. a
Wilks, D. S.: Statistical methods in the atmospheric sciences, vol. 100, Academic press, ISBN 9780128165270, 2011. a, b
Wilks, Y., Fass, D., Guo, C.-M., McDonald, J. E., Plate, T., and Slator, B. M.: Providing machine tractable dictionary tools, Mach. Transl., 5, 99–154, https://doi.org/10.1007/BF00393758, 1990. a
Wolfensberger, D., Scipion, D., and Berne, A.: Detection and characterization of the melting layer based on polarimetric radar scans, Q. J. Roy. Meteor. Soc., 142, 108–124, https://doi.org/10.1002/qj.2672, 2016. a
Xie, X., Evaristo, R., Simmer, C., Handwerker, J., and Trömel, S.: Precipitation and microphysical processes observed by three polarimetric X-band radars and ground-based instrumentation during HOPE, Atmos. Chem. Phys., 16, 7105–7116, https://doi.org/10.5194/acp-16-7105-2016, 2016. a
Zawadzki, I., Fabry, F., and Szyrmer, W.: Observations of supercooled water and secondary ice generation by a vertically pointing X-band Doppler radar, Atmos. Res., 59, 343–359, https://doi.org/10.1016/S0169-8095(01)00124-7, 2001. a
Zhang, C., Mapes, B. E., and Soden, B. J.: Bimodality in tropical water vapour, Q. J. Roy. Meteor. Soc., 129, 2847–2866, https://doi.org/10.1256/qj.02.166, 2003. a
- Abstract
- Introduction
- Data and processing
- Methodology
- Developing a riming detection algorithm for C-band radars
- Results and verification
- Conclusions
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Special issue statement
- Acknowledgements
- Financial support
- Review statement
- References
- Abstract
- Introduction
- Data and processing
- Methodology
- Developing a riming detection algorithm for C-band radars
- Results and verification
- Conclusions
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Special issue statement
- Acknowledgements
- Financial support
- Review statement
- References